#include "stm32f10x.h" #include "stm32f10x_gpio.h" #include "stm32f10x_rcc.h" #include "stm32f10x_usart.h" #include "stdbool.h" #include "main.h" #include "utils.h" #include "uart.h" #include "math.h" #include "ste2007.h" extern bool UART_RDY; uint32_t SystemCoreClock = 72000000; // Clock STM32F103 at reset int main() { // --- RCC configuration ------- RCC->APB2ENR |= RCC_APB2ENR_IOPCEN; // Enable GPIOC clock RCC->APB2ENR |= RCC_APB2ENR_IOPBEN; // Enable GPIOB clock RCC->APB2ENR |= RCC_APB2ENR_IOPAEN | RCC_APB2ENR_USART1EN; // Enable GPIOA and USART1 clocks RCC->APB1ENR |= RCC_APB1ENR_USART2EN; // Enable USART2 clock // --- GPIO configuration ---- // Configure PC13 as push-pull output (max speed 2 MHz) GPIOC->CRH &= ~(GPIO_CRH_CNF13 | GPIO_CRH_MODE13); GPIOC->CRH |= GPIO_CRH_MODE13_1; // Output mode, max speed 2 MHz (0b10) // Configure PA9 as alternate function push-pull (TX) GPIOA->CRH &= ~(GPIO_CRH_CNF9 | GPIO_CRH_MODE9); // Clear bits GPIOA->CRH |= (GPIO_CRH_CNF9_1 | GPIO_CRH_MODE9); // Alternate function output, max speed 50 MHz // Configure PA10 as input floating (RX) GPIOA->CRH &= ~(GPIO_CRH_CNF10 | GPIO_CRH_MODE10); // Clear bits GPIOA->CRH |= GPIO_CRH_CNF10_0; // Floating input // --- USART2 configuration --- // Configure GPIO pins // PB4 (RST) - General Purpose Output Push-Pull, 50MHz GPIOB->CRL &= ~(GPIO_CRL_CNF4 | GPIO_CRL_MODE4); GPIOB->CRL |= (GPIO_CRL_MODE4_0 | GPIO_CRL_MODE4_1); // MODE=11 (50 MHz) // PA2 (USART2_TX/MOSI) - Alternate Push-Pull, 50MHz GPIOA->CRL &= ~(GPIO_CRL_CNF2 | GPIO_CRL_MODE2); GPIOA->CRL |= (GPIO_CRL_CNF2_1 | GPIO_CRL_MODE2); // PA4 (USART2_CK/SCK) - Alternate Push-Pull, 50MHz GPIOA->CRL &= ~(GPIO_CRL_CNF4 | GPIO_CRL_MODE4); GPIOA->CRL |= (GPIO_CRL_CNF4_1 | GPIO_CRL_MODE4); // PA5 (CS) - General Purpose Output Push-Pull, 50MHz GPIOA->CRL &= ~(GPIO_CRL_CNF5 | GPIO_CRL_MODE5); GPIOA->CRL |= (GPIO_CRL_MODE5_0 | GPIO_CRL_MODE5_1); // Output, 50MHz // Configure USART2 for 9-bit SPI Master Mode //USART2->BRR = 0x138; // 115200 baud @ 36MHz APB1 USART2->BRR = 0x10; // 2.25Mbps @ 36MHz (0x10 = 16 → 36MHz/16=2.25MHz) USART2->CR2 = USART_CR2_CLKEN | // Enable clock output USART_CR2_STOP_1 | // 1 stop bit USART_CR2_LBCL; // тактовый импульс для 9-го бита USART2->CR1 = USART_CR1_M | // 9-bit data (M=1) USART_CR1_TE | // Enable transmitter USART_CR1_UE; // Enable USART // --- UART1 configuration --- //USART1->BRR = 0x1d4c; // 9600 baud @ 72 MHz (APB2) USART1->BRR = 0x271; // 115200 baud @ 72MHz (APB2) USART1->CR1 = USART_CR1_TE | USART_CR1_RE | USART_CR1_UE; // Enable TX, RX and USART // Enable RX interrupt (Optional) USART1->CR1 |= USART_CR1_RXNEIE; NVIC_EnableIRQ(USART1_IRQn); // ---- SysTick Configuration ---- systick_init(); // Let's go.. __enable_irq(); usart1_print_string("System ready...\r\n"); // Constants and initialization bool tick_enabled=true; const uint32_t DEFAULT_INTERVAL = WAIT_MS; // 50 milliseconds uint32_t interval = DEFAULT_INTERVAL; uint32_t toggle_interval=1000/interval; // led interval is 1000ms uint32_t toggle_counter=toggle_interval; // led interval multiplier ste2007_init(); // Initialize display ste2007_vertical_lines(12,0,0xff); // 12 vertical solid lines ste2007_update_display(); for(uint32_t cycle_count = 0; ; cycle_count++) { // 1. Handle system delays and commands int32_t remaining_delay = smart_delay(interval); // Process UART commands if received if (UART_RDY) { tick_enabled = uart_command_processing(tick_enabled); } // 2. Update interval for next cycle interval = (remaining_delay > 0) ? (uint32_t)remaining_delay : DEFAULT_INTERVAL; // 3. Execute periodic tasks when delay completes if (remaining_delay <= 0 && --toggle_counter == 0) { // Toggle LED on PC13 GPIOC->ODR ^= GPIO_Pin_13; toggle_counter=toggle_interval; // Optional debug output if (tick_enabled) { usart1_printf("Cycle: %u\r\n", cycle_count/toggle_interval); } } // LCD draw ste2007_horizont_scroll(1); // scroll to right ste2007_update_display(); } }
STM32F103C8T6 без SPL, HAL и без IDE: Система тактирования RCC, таймер SysTick, UART передатчик, планировщик задач, SPI и I2C модули в режиме мастера
разделы: STM32 , дата: 19 октября 2018г.
Внимание! Летом 2025г. статья была полностью переписана. Первоначальную версию статьи можно открыть по следующей ссылке. "За бортом" осталась осталась главы по SPI и легковесной RTOS. Их планируется добавить позже. Так же в планах добавить раздел по АЦП, ЦАП, I2S и конечно же по работе с таймерам.
Когда я впервые начал знакомиться с микроконтроллерами семейства STM32, то обратил внимание на то, что прошивки даже с самыми простыми алгоритмами (например Blink), по меркам 8-битных микроконтроллеров, имеют огромный размер: от одного килобайта и больше. Поэтому целью этой статьи стала попытка написания прошивок для STM32 в стиле 8-битных микроконтроллеров, когда вы полностью контролируете процесс компиляции, используя лишь: компилятор, флешер и текстовый редактор. Соответственно в статье рассматриваются типовые на мой взгляд вопросы при переходе с 8-битников на 32-разрядную архитектуру: как помигать светодиодом, как настроить тактирование, как завести SPI и поднять I2C.
В данной статье рассматривается программирование "на регистрах" в системах Linux. Т.к. сейчас много микроконтроллеров китайского производства, они содержат самые разнообразные SDK для работы, но в принципе многие так и иначе имеют схожесть с STM32 по адресам регистров. Даже если вы откроете даташит на CH32V003, который вообще-то RISC-V, то увидите те же регистры GPIO, что в stm32f103xx. Поэтому я считаю, что надо уметь составлять свой SDK "с нуля", по одним даташитам.
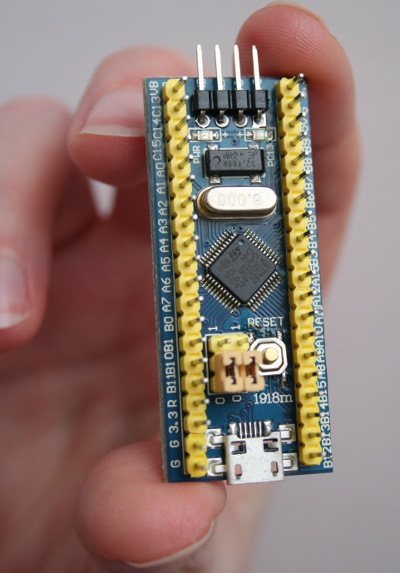
Оборудование. В статье я буду использовать популярную плату "Blue Pill" на микроконтроллере STM32F103C8T6, программатор ST-LINK v2 (китайская реплика), USB-UART преобразователь FT232RL, дисплей SSD1306 и флешку M24C08 на I2C интерфейсе. Кроме того, у меня имеется простенький логический анализатор, приобретенный в безымянном китайшопе.
-
Список используемой документации:
- Перевод на русский язык руководства по программированию STM32F10x и справочного руководства по STM32F105-107 альтернативная ссылка
- Cortex-M3 TRM Cortex-M3 Technical Reference Manual
- Cortex-M3: Руководство программиста (PM0056), для чипов серий: STM32F10xxx/20xxx/21xxx/L1xxxx.
- Справочное руководство (Reference Manual: RM0008), для чипов следующих серий: STM32F101xx, STM32F102xx, STM32F103xx, STM32F105xx and STM32F107xx advanced Arm.
- Datasheet на чипы: STM32F103x8/STM32F103xB.
- STM32F10xxx I2C optimized examples, Application note AN2824
Содержание:
-
I. Создание базового проекта для STM32F103xx
- Вместо введения
- Минималистический Blink размером в 148 байт
- Небольшой ликбез по ассемблеру Cortex-M3
- Таблица векторов
- Настройка системы тактирования - RCC (Reset and Clock Control)
-
II. Работа с периферией микроконтроллера STM32F103xx
- Функция задержки на ассемблерных инструкциях
- Функция задержки на прерывании таймера SysTick
- Настройка и передача данных по UART
- Прием строки через UART интерфейс
- Числа с плавающей запятой, подключение стандартной библиотеки Си к проекту
- USART в режиме SPI-master
- USART + DMA в режиме SPI-master
- Битовая память в Cortex-M3
- Semihosting
- UART в полудуплексном режиме в качестве драйвера шины 1-Wire
- USB CDC драйвер для STM32F103 - Virtual COM port
- Регистры I2C интерфейса, делаем сканер I2C шины
- Функции записи по I2C шине
- Запись на I2C шину посредством DMA
- Однобайтный режим чтения с I2C шины
- Чтение массива через шину I2C
- Двухбайтный режим чтения, написание общих функций для I2C
-
Продолжение цикла STM32F103C8 без HAL и SPL:
- Работа с SPI дисплеями Nokia_5110 и ST7735
- Работа с монохромными дисплеями STE2007 и SSD1306
- Вывод текста на дисплей ST7735
При написании примеров я использовал кросс-компилятор arm-none-eabi-gcc версии 10.3 скачанный с сайта ARM. Данная версия сейчас (май 2025г.) объявлена устаревшей (deprecated), однако у меня она работала стабильно, потому приведу альтернативные ссылки для скачивания: версия 10.3 тарбол для linux x86_64, zip-архив для win32. Актуальная версия компилятора - 14.2 тарбол для linux x86_64, и zip-архив для win64.
Git со всеми проектами к статье здесь: https://gitlab.com/flank1er/stm32f103c8_cmsis_examples
1) Вместо введения
В настоящее время (2025 год), доступно большое число микроконтролеров с архитектурой Cortex-M3. Это STM32F1xx, их реплики, клоны, и различные "мутанты" с непонятными характеристиками. Данные изделия предлагаются производителями со своими библиотеками и средами разработки. В текущей ситуации нужно уметь создать проект с нуля, имея на руках только даташит. Нужно уметь интегрировать этот проект в современную среду разработки, дабы не прыгать из одной программы в другую. Так или иначе, STM32F103xx сейчас является образцом, который копируют другие производители, и который следует знать.
Началось все с того, что меня несколько обескуражил размер прошивки минимального проекта в TrueStudio (после покупки компанией ST была переименованна в STM32CubeIDE) - 1572 байт:

В SW4STM32 получалась какая-то такая же цифра, при этом у меня в настройках проекта была выставлена опция: --gc-section, которая даёт команду компоновщику удалять неиспользуемый код:

Даже в Arduino-STM32 Blink "весил" в пределах одного килобайта.
Сначала я подумал, что все дело в используемой SPL и если переписать код на регистрах, то ситуация исправится. Давайте посмотрим так ли это.
Первая вызываемая функция имеет такой вид:
void RCC_APB2PeriphClockCmd(uint32_t RCC_APB2Periph, FunctionalState NewState) { /* Check the parameters */ assert_param(IS_RCC_APB2_PERIPH(RCC_APB2Periph)); assert_param(IS_FUNCTIONAL_STATE(NewState)); if (NewState != DISABLE) { RCC->APB2ENR |= RCC_APB2Periph; } else { RCC->APB2ENR &= ~RCC_APB2Periph; } }
т.е. ее можно смело заменить строкой вида:
RCC->APB2ENR |= RCC_APB2Periph_GPIOC;
Вызов функции инициализации порта GPIO оборачивается вызовом такой штуки:
void GPIO_Init(GPIO_TypeDef* GPIOx, GPIO_InitTypeDef* GPIO_InitStruct) { uint32_t currentmode = 0x00, currentpin = 0x00, pinpos = 0x00, pos = 0x00; uint32_t tmpreg = 0x00, pinmask = 0x00; /* Check the parameters */ assert_param(IS_GPIO_ALL_PERIPH(GPIOx)); assert_param(IS_GPIO_MODE(GPIO_InitStruct->GPIO_Mode)); assert_param(IS_GPIO_PIN(GPIO_InitStruct->GPIO_Pin)); /*---------------------------- GPIO Mode Configuration -----------------------*/ currentmode = ((uint32_t)GPIO_InitStruct->GPIO_Mode) & ((uint32_t)0x0F); if ((((uint32_t)GPIO_InitStruct->GPIO_Mode) & ((uint32_t)0x10)) != 0x00) { /* Check the parameters */ assert_param(IS_GPIO_SPEED(GPIO_InitStruct->GPIO_Speed)); /* Output mode */ currentmode |= (uint32_t)GPIO_InitStruct->GPIO_Speed; } /*---------------------------- GPIO CRL Configuration ------------------------*/ /* Configure the eight low port pins */ if (((uint32_t)GPIO_InitStruct->GPIO_Pin & ((uint32_t)0x00FF)) != 0x00) { tmpreg = GPIOx->CRL; for (pinpos = 0x00; pinpos < 0x08; pinpos++) { pos = ((uint32_t)0x01) << pinpos; /* Get the port pins position */ currentpin = (GPIO_InitStruct->GPIO_Pin) & pos; if (currentpin == pos) { pos = pinpos << 2; /* Clear the corresponding low control register bits */ pinmask = ((uint32_t)0x0F) << pos; tmpreg &= ~pinmask; /* Write the mode configuration in the corresponding bits */ tmpreg |= (currentmode << pos); /* Reset the corresponding ODR bit */ if (GPIO_InitStruct->GPIO_Mode == GPIO_Mode_IPD) { GPIOx->BRR = (((uint32_t)0x01) << pinpos); } else { /* Set the corresponding ODR bit */ if (GPIO_InitStruct->GPIO_Mode == GPIO_Mode_IPU) { GPIOx->BSRR = (((uint32_t)0x01) << pinpos); } } } } GPIOx->CRL = tmpreg; } /*---------------------------- GPIO CRH Configuration ------------------------*/ /* Configure the eight high port pins */ if (GPIO_InitStruct->GPIO_Pin > 0x00FF) { tmpreg = GPIOx->CRH; for (pinpos = 0x00; pinpos < 0x08; pinpos++) { pos = (((uint32_t)0x01) << (pinpos + 0x08)); /* Get the port pins position */ currentpin = ((GPIO_InitStruct->GPIO_Pin) & pos); if (currentpin == pos) { pos = pinpos << 2; /* Clear the corresponding high control register bits */ pinmask = ((uint32_t)0x0F) << pos; tmpreg &= ~pinmask; /* Write the mode configuration in the corresponding bits */ tmpreg |= (currentmode << pos); /* Reset the corresponding ODR bit */ if (GPIO_InitStruct->GPIO_Mode == GPIO_Mode_IPD) { GPIOx->BRR = (((uint32_t)0x01) << (pinpos + 0x08)); } /* Set the corresponding ODR bit */ if (GPIO_InitStruct->GPIO_Mode == GPIO_Mode_IPU) { GPIOx->BSRR = (((uint32_t)0x01) << (pinpos + 0x08)); } } } GPIOx->CRH = tmpreg; } }
По большому счету, эта функция устанавливает значение регистров: GPIOx->CRL или/и GPIOx->CRH. Вспоминаем, что это за регистры:

Регистр GPIOx->CRL конфигурирует режим пинов от 0 до 7. Регистр GPIOx->CRH конфигурирует режим пинов от 8 до 15. Т.к. светодиод на Blue Pill подключён к PC13, то нам нужен регистр GPIOС->CRH. Чтобы его сконфигурировать. В поле MOD13[1:0] можно задать максимальную частоту переключения нужного пина в Output режиме. Полагаю 2МГц будет вполне достаточно, значит записываем в него значение 2. По умолчанию, в режиме выхода поле CNF13[1:0] конфигурирует пин в Push-Pull режим, что нас вполне устраивает, следовательно оставляем там по нулям.
Т.о. вызов функции GPIO_Init(GPIOC, &GPIO_InitStructure) можно заменить следующей парой строк:
GPIOC->CRH &= ~(uint32_t)(0xf<<20);
GPIOC->CRH |= (uint32_t)(0x2<<20);
Переключение пина осуществляется через регистр GPIOx->ODR:

Т.е. вызов функции: "GPIO_SetBits(GPIOC,GPIO_Pin_13)" можно заменить на: "GPIOC->ODR |= GPIO_Pin_13".
В Cortex-M3 нет тех удобных битовых инструкций что были в STM8 (имеется ввиду bset,bres,bcpl). Поэтому для побитового изменения состояния регистра GPIOx->ODR, были специально введены дополнительные регистры: GPIOx->BSRR и GPIOx->BRR. Посмотрим на их описание:


Эти регистры управляют состоянием GPIOx->ODR путем записи единицы в их соответствующий разряд. Т.е. вместо GPIOC->ODR &= ~(GPIO_Pin_13); можно использовать GPIOC->BRR = GPIO_Pin_13. Такой вариант разложится компилятором в ОДНУ ассемблерную инструкцию, вместо трёх, если делать непосредственно через GPIOC->ODR регистр. Обратите внимание, что через BSRR/BRR регистры одной инструкцией можно менять состояние сразу нескольких пинов порта. При желании можно организовать параллельную шину через bit-bang.
В итоге, функция main() примет вид:
int main() { // enable GPIOC port RCC->APB2ENR |= RCC_APB2Periph_GPIOC; // --- GPIO setup ---- GPIOC->CRH &= ~(uint32_t)(0xf<<20); GPIOC->CRH |= (uint32_t)(0x2<<20); for(;;){ GPIOC->BSRR=GPIO_Pin_13; dummy_loop(600000); GPIOC->BRR=GPIO_Pin_13; dummy_loop(600000); } }Примечание от 2025г. Вместо использования непонятных цифр при конфигурации регистра ввода-вывода "GPIOC->CRH", можно было использовать именованные константы определенные в заголовочных файлах SPL:
// Configure PC13 as push-pull output (max speed 2 MHz) GPIOC->CRH &= ~(GPIO_CRH_CNF13 | GPIO_CRH_MODE13); GPIOC->CRH |= GPIO_CRH_MODE13_1; // Output mode, max speed 2 MHz (0b10)
После компиляции размер прошивки сократился до 1084 байт. Уже лучше, но все-равно многовато. После дизассеблирования, становится ясно, к прошивке кроме нашего кода добавляется ещё стандартная библиотека Си: libc или newlib (облегчённый вариант стандартной библиотеки Cи), а также некоторые функции конфигурации микроконтроллера (startup files) включая таблицу прерываний. Все вместе это и занимает один килобайт. Ничего не имею против таблицы, но от всего остального (библиотеки libc и startup файлов) хотелось бы избавиться. В TrueStudio у нас нет полного контроля за Makefile'ом, поэтому предлагаю закрыть эту IDE и перейти в консоль.
2) Минималистичный Blink размером в 148 байт
Для начала давайте разберемся с форматом бинарной прошивки, т.е. с чего процессор начинает работу и как он находит программу. Потому-что, как вы наверно догадываетесь, прошивка в ARM начинается не с программного кода, и даже не с таблицы векторов.
Те, кто внимательно читали документацию, знают, что прошивка для Cortex-M3 обязательно должна начинаться со значения указателя стека, после чего должны идти адреса обработчиков прерываний: Reset, NMI, Hard Fault:

На адрес 0x00000000 происходит маппинг: или флеш-памяти или ОЗУ, в зависимости от конфигурации boot-пинов. Флеш-память начинается с адреса 0x08000000.
Т.о. минимальный вариант программы Blink для stm32f103 можно записать следующим образом:
#include "stm32f10x.h" #include "stm32f10x_gpio.h" #include "stm32f10x_rcc.h" #define WAIT 600000 asm(".word 0x20005000\n\t" // stack pointer (adjust based on your device's RAM size) ".word main+1\n\t" // reset handler (Thumb mode) ".word fault_irq+1\n\t" // NMI ".word fault_irq+1\n\t" // HardFault ".word fault_irq+1\n\t" // MemManage ".word fault_irq+1\n\t" // BusFault ".word fault_irq+1\n\t"); // UsageFault void fault_irq() { while (1); } void dummy_loop(volatile uint32_t count) { while (--count); } int main() { // Enable GPIOC clock RCC->APB2ENR |= RCC_APB2Periph_GPIOC; // Configure PC13 as push-pull output (max speed 2 MHz) GPIOC->CRH &= ~(GPIO_CRH_CNF13 | GPIO_CRH_MODE13); GPIOC->CRH |= GPIO_CRH_MODE13_1; // Output mode, max speed 2 MHz (0b10) // Super loop to toggle PC13 while (1) { GPIOC->BSRR = GPIO_Pin_13; // Set PC13 dummy_loop(WAIT); GPIOC->BRR = GPIO_Pin_13; // Reset PC13 dummy_loop(WAIT); } }
Здесь, мы в начале программы пишем заголовок, в который включены: значение стека и адреса обязательных векторов прерываний. Среди векторов прерываний выделется Reset, который указывает на начало программы.
Так же как в AVR, где для включения имен регистров ввода-вывода и констант пишется:
#include <avr/io.h>
В STM32 используется аналогичные включения:
#include "stm32f10x.h" #include "stm32f10x_gpio.h" #include "stm32f10x_rcc.h"
В файле "stm32f10x.h" содержатся физические адреса регистров, а в "stm32f10x_gpio.h" и "stm32f10x_rcc.h" описаны структуры, маски и константы, чтобы к регистрам ввода-вывода можно было обращаться в стиле "RCC->APB2ENR = какое-то значение". Данные заголовочные файлы были взяты из SPL для stm32f103xx, они не содержат код, только адреса и структуры.
Таблица векторов в Cortex-M3 это просто массив c адресами обработчиков прерываний. Таких инструкций как: INT и IRET, в Cortex-M3 не существует. Все адреса прерываний должны быть нечётными! Т.е. единица прибавляемая к адресу метки нужна для получения нечётного числа, чтобы указать, что инструкция в обработчике прерывания из набора Thumb/Thumb2, а не из 32-битных инструкций ARM. Если вектор будет указывать на чётный адрес, то переход по нему приведёт к срабатыванию прерывания Usage Fault.
Пока на данном этапе, структура проекта выглядит так:
$ tree . . ├── CMSIS │ ├── core │ │ ├── core_cm3.c │ │ └── core_cm3.h │ └── device │ ├── stm32f10x.h │ └── system_stm32f10x.h ├── SPL │ └── inc │ ├── stm32f10x_gpio.h │ └── stm32f10x_rcc.h └── main.c 5 directories, 7 files
Для компиляции прошивки под ARM-микроконтроллер потребуется скрипт компоновщика. В AVR он тоже требуется, но обычно входит в пакет компилятора, и никто о нем не думает. Что бы не кидаться сразу многостраничным скриптом компоновщика, про который нам в принципе нужно знать совем немного, я взял скрипт из шаблонного проекта SW4STM32 и сократил его настолько, что бы данный Blink просто напросто собрался:
/* Highest address of the user mode stack */
_estack = 0x20005000; /* end of RAM */
/* Memories definition */
MEMORY
{
RAM (xrw) : ORIGIN = 0x20000000, LENGTH = 20K
ROM (rx) : ORIGIN = 0x8000000, LENGTH = 64K
}
/* Sections */
SECTIONS
{
/* The program code and other data into ROM memory */
.text :
{
. = ALIGN(4);
*(.text) /* .text sections (code) */
} >ROM
/* Constant data into ROM memory*/
.rodata :
{
. = ALIGN(4);
*(.rodata) /* .rodata sections (constants, strings, etc.) */
} >ROM
/* Initialized data sections into RAM memory */
.data :
{
. = ALIGN(4);
*(.data) /* .data sections */
} >RAM AT> ROM
/* Uninitialized data section into RAM memory */
. = ALIGN(4);
.bss :
{
*(.bss)
*(COMMON)
. = ALIGN(4);
_ebss = .; /* define a global symbol at bss end */
__bss_end__ = _ebss;
} >RAM
}
Назовем его "stm32f10xx8.ld". Теперь у нас есть все для компиляции, поэтому давайте сделаем это:
$ arm-none-eabi-gcc -mthumb -mcpu=cortex-m3 -O0 -c -g -DSTM32F10X_MD -I ./CMSIS/device -I ./CMSIS/core -I ./SPL/inc -o main.o ./main.c
Компоновка:
$ arm-none-eabi-ld -Tstm32f10xx8.ld main.o -o firmware.elf
Тоже самое можно сделать одной командой:
$ arm-none-eabi-gcc -T stm32f10xx8.ld -nostartfiles -mcpu=cortex-m3 -g -mthumb -DSTM32F10X_MD -I ./CMSIS/device -I ./CMSIS/core -I ./SPL/inc -o firmware.elf main.c
Смотрим на размер получившийся прошивки:
$ arm-none-eabi-size ./firmware.elf
text data bss dec hex filename
148 0 0 148 94 ./firmware.elf
148 байт, как и было обещано. А почему-бы не добавить оптимизации? Добавим ключ "-Os":
$ arm-none-eabi-gcc -T stm32f10xx8.ld -nostartfiles -mcpu=cortex-m3 -g -Os -mthumb -DSTM32F10X_MD -I ./CMSIS/device -I ./CMSIS/core -I ./SPL/inc -o firmware.elf main.c $ arm-none-eabi-size ./firmware.elf text data bss dec hex filename 108 0 0 108 6c ./firmware.elf
108 байт - это уже близко к прошивке 8-битного микроконтроллера. Для ATtiny13A прошивка с Blink выходит на 68 байт. Но для 32-разрядного микроконтроллера программа всегда будет больше памяти занимать, т.к. физические адреса тут в два раза длиннее.
Прошиваем:
$ arm-none-eabi-objcopy -O binary firmware.elf ./firmware.bin $ st-flash write ./firmware.bin 0x08000000
После прошивки на плате должен начать мигать зеленый светодиод. На логическом анализаторе это выглядит следующим образом:

Сейчас микроконтроллер работает на дефолтных настройках, т.е. он тактируется от HSI с частотой 8 МГц.
Для удобства сборки можно добавить к проекту Makefile:
# Toolchain setup (adjust paths if needed) CC = arm-none-eabi-gcc OBJCOPY = arm-none-eabi-objcopy SIZE = arm-none-eabi-size RM = rm -f # Target and output names TARGET = firmware BIN = $(TARGET).bin HEX = $(TARGET).hex ELF = $(TARGET).elf # Include paths INC = -ICMSIS/device INC += -ICMSIS/core INC += -ISPL/inc DEF = -DSTM32F10X_MD # MCU and flags MCU = cortex-m3 CFLAGS = -mcpu=$(MCU) -mthumb -Wall -Os -ffunction-sections -fdata-sections LDFLAGS = -T stm32f10xx8.ld -nostartfiles # Source files SRCS = main.c # Build rules all: $(BIN) $(HEX) size $(ELF): $(SRCS) $(CC) $(CFLAGS) $(DEF) $(INC) $(LDFLAGS) $^ -o $@ $(BIN): $(ELF) $(OBJCOPY) -O binary $< $@ $(HEX): $(ELF) $(OBJCOPY) -O ihex $< $@ size: $(ELF) $(SIZE) --format=berkeley $< # Flash to STM32 via ST-Link flash: $(BIN) st-flash write $< 0x08000000 # Clean clean: $(RM) $(ELF) $(BIN) $(HEX)
Здесь я думаю, что все понятно.
Что еще можно сделать? Можно добавить к проекту CMakeLists.txt для сборки посредством CMake, его я спрятал под спойлер.
показать CMakeLists.txtcmake_minimum_required(VERSION 3.12) project(firmware LANGUAGES C) # Toolchain setup set(CMAKE_SYSTEM_NAME Generic) set(CMAKE_SYSTEM_PROCESSOR arm) set(CMAKE_C_COMPILER arm-none-eabi-gcc) set(CMAKE_OBJCOPY arm-none-eabi-objcopy) set(CMAKE_SIZE arm-none-eabi-size) # Target and output names set(TARGET firmware) set(ELF ${TARGET}.elf) set(BIN ${TARGET}.bin) set(HEX ${TARGET}.hex) # Include paths include_directories( CMSIS/device CMSIS/core SPL/inc ) # Definitions add_definitions(-DSTM32F10X_MD) # MCU and flags set(MCU cortex-m3) set(CMAKE_C_FLAGS "-mcpu=${MCU} -mthumb -Wall -Os -ffunction-sections -fdata-sections") set(CMAKE_EXE_LINKER_FLAGS "-T ${CMAKE_SOURCE_DIR}/stm32f10xx8.ld -nostartfiles") # Source files set(SRCS main.c) # Build executable add_executable(${ELF} ${SRCS}) # Generate binary and hex files add_custom_command( TARGET ${ELF} POST_BUILD COMMAND ${CMAKE_OBJCOPY} -O binary ${ELF} ${BIN} COMMAND ${CMAKE_OBJCOPY} -O ihex ${ELF} ${HEX} COMMENT "Generating ${BIN} and ${HEX}" ) # Print size information add_custom_target( size COMMAND ${CMAKE_SIZE} --format=berkeley ${ELF} DEPENDS ${ELF} ) # Flash target (requires ST-Link) add_custom_target( flash COMMAND st-flash write ${BIN} 0x08000000 DEPENDS ${BIN} )
Использование:
$ mkdir build && cd $_ $ cmake -DCMAKE_BUILD_TYPE=Release .. $ make && make size
Qbs-скрипт я здесь выкладывать не буду, он будет доступен на git. Скрипт для Qbs версии:
$ qbs --version
1.24.1
Подробно о связке STM32+Qbs+QtCreator я писал в: "Qbs-скрипт для STM32F103C8-проекта на CMSIS (пошаговая инструкция)"
Qbs-скрипт позволяет использовать IDE QtCreator для написании кода, и при этом контролировать процесс сборки не хуже Makefile'ов (Cmake все-равно какие-то свои флаги добавляет и прошивка получается толще):

QtCreator это нативная программа, а не Java как STM32CubeIDE, шустро ворочается, не требует регистрации, имеет статический линтер на Clang и возможность отладки:

На мой взгляд это самая недооцененная IDE для разработки.
3) Небольшой ликбез по ассемблеру Cortex-M3
С помощью команды:
$ arm-none-eabi-objdump -S ./firmware.elf
можно дизассемблировать прошивку, что бы убедиться, что заголовок с константами расположен именно по адресу 0x8000000:
Disassembly of section .text:
08000000 <.text>:
8000000: 20005000 .word 0x20005000
8000004: 08000031 .word 0x08000031
8000008: 0800001d .word 0x0800001d
800000c: 0800001d .word 0x0800001d
8000010: 0800001d .word 0x0800001d
8000014: 0800001d .word 0x0800001d
8000018: 0800001d .word 0x0800001d
Disassembly of section .text.fault_irq:
0800001c <fault_irq>:
".word fault_irq+1\n\t" // MemManage
".word fault_irq+1\n\t" // BusFault
".word fault_irq+1\n\t"); // UsageFault
void fault_irq() {
while (1);
800001c: e7fe b.n 800001c <fault_irq>
Disassembly of section .text.dummy_loop:
0800001e <dummy_loop>:
}
void dummy_loop(volatile uint32_t count) {
800001e: b082 sub sp, #8
8000020: 9001 str r0, [sp, #4]
while (--count);
8000022: 9b01 ldr r3, [sp, #4]
8000024: 3b01 subs r3, #1
8000026: 9301 str r3, [sp, #4]
8000028: 2b00 cmp r3, #0
800002a: d1fa bne.n 8000022 <dummy_loop+0x4>
}
800002c: b002 add sp, #8
800002e: 4770 bx lr
Disassembly of section .text.startup.main:
08000030 <main>:
GPIOC->CRH &= ~(GPIO_CRH_CNF13 | GPIO_CRH_MODE13);
GPIOC->CRH |= GPIO_CRH_MODE13_1; // Output mode, max speed 2 MHz (0b10)
// Super loop to toggle PC13
while (1) {
GPIOC->BSRR = GPIO_Pin_13; // Set PC13
8000030: f44f 5100 mov.w r1, #8192 ; 0x2000
RCC->APB2ENR |= RCC_APB2Periph_GPIOC;
8000034: 4a0b ldr r2, [pc, #44] ; (8000064 <main+0x34>)
int main() {
8000036: b508 push {r3, lr}
RCC->APB2ENR |= RCC_APB2Periph_GPIOC;
8000038: 6993 ldr r3, [r2, #24]
dummy_loop(WAIT);
800003a: 480b ldr r0, [pc, #44] ; (8000068 <main+0x38>)
RCC->APB2ENR |= RCC_APB2Periph_GPIOC;
800003c: f043 0310 orr.w r3, r3, #16
8000040: 6193 str r3, [r2, #24]
GPIOC->CRH &= ~(GPIO_CRH_CNF13 | GPIO_CRH_MODE13);
8000042: f5a2 3280 sub.w r2, r2, #65536 ; 0x10000
8000046: 6853 ldr r3, [r2, #4]
8000048: f423 0370 bic.w r3, r3, #15728640 ; 0xf00000
800004c: 6053 str r3, [r2, #4]
GPIOC->CRH |= GPIO_CRH_MODE13_1; // Output mode, max speed 2 MHz (0b10)
800004e: 6853 ldr r3, [r2, #4]
8000050: f443 1300 orr.w r3, r3, #2097152 ; 0x200000
8000054: 6053 str r3, [r2, #4]
GPIOC->BSRR = GPIO_Pin_13; // Set PC13
8000056: 6111 str r1, [r2, #16]
dummy_loop(WAIT);
8000058: f7ff ffe1 bl 800001e <dummy_loop>
GPIOC->BRR = GPIO_Pin_13; // Reset PC13
800005c: 6151 str r1, [r2, #20]
dummy_loop(WAIT);
800005e: f7ff ffde bl 800001e <dummy_loop>
while (1) {
8000062: e7f8 b.n 8000056 <main+0x26>
8000064: 40021000 .word 0x40021000
8000068: 000927c1 .word 0x000927c1
Здесь, возможно, потребуется небольшой ликбез.
1. Cortex-M3 был разработан двадцать лет назад, но до сих пор явлется популярным ядром для микроконтроллеров, несмотря на то, что впоследствии были выпущены более оптимизированные Cortex-M0/M0+ и более прогрессивные Cortex-M4, на смену которым в свою очередь выпущены Cortex-M23 и Cortex-M33. Все эти ядра занимают свою нишу в разработке электроники.
Coretx-M3 это совокупный набор инструкций Thumb и Thumb II. Наглядно на количество команд в том и другом наборе можно посмотреть на следующей картинке:

Thumb - это набор 16-битных инструкций. Исключением являются инструкция BL и барьерные инструкции (BL, DMB, DSB, ISB), которые имеют длину 4 байта. Thumb II - это набор 32-битных инструкций. Несмотря на то, что количество инструкций Thumb II в разы больше, чем у Thumb, многие (но не все) эти инструкции можно заменить связкой из пары инструкций Thumb I. Но зачастую, инструкции Thumb II будут работать быстрее, нежели такая связка.
Все инструкции в Cortex-M3 либо 16-битные, либо 32-битные. Одно-байтных, трех-байтных, пяти-байтных инструкций в данной архитектуре не существует.
2. В Cortex M3, чтобы выполнить какие-то действия над данными в ОЗУ, их нужно загрузить сначала в регистры, потом произвести над ними какие-то действия, и затем снова переслать их в ОЗУ. Эти операции перемещения занимают много времени, особенно когда данных много, например при обработке звука или изображения. Для того что бы сгладить этот недостаток, используется кеширование, SIMD инструкции и DMA.
3. В Cortex-M3 имеется 13 регистров общего назначения (РОН) R0-R12:

Все регистры делятся на нижние (R0-R7) и верхние (R8-R15). Инструкции из набора Thumb I могут адресовать только нижние регистры. Исключеним является инструкция MOV которая может адресовать в том числе и верхние регистры общего назначения. Инструкции из набора Thumb II могут адресовать все РОН, а так же регистры LR и SP. Регистр R15 имеет является счетчиком команд - PC, R14 - имеет обозначение LR - Link register, в него помещается адрес возврата при вызове подпрограммы. Регистр R13 - является указателем стека - SP, он "с двойным дном", т.е. в зависимости от того, выполняется ли обычная программа, либо прерывание (более строго будет говорить о выполнении кода с повышенными привилегиями, т.е. код который будет исполняться в первую очередь), указатель стека показывает разные значения. Кроме этих 16-регистров, имеется специальный статусный регистр xPSR. Он явлется составным из трех регистров: APSR + IPSR + EPSR.
4. В Cortex-M3 нет инструкций CALL/RET. Вместо них есть переход с сохранением адреса возврата в регистре R14/LR. Собственно: BL и BX. Если подпрограмма содержит в себе вызов другой подпрограммы, то содержимое R14/LR следует сохранить в стеке. Возврат тогда будет по инструкции: POP {PC}. например:
MySubroutine:
PUSH {LR} ; сохраняем в стеке значение LR
BL AnotherSub ; переход на другую подпрограмму, адрес возврата автоматически сохраняется в LR
POP {PC} ; возврат из подпрограммы
4. В Cortex-M3 нет переходов по абсолютному адресу, все переходы относительные. Это означает, что весь код являются перемещаемым.
5. Инструкций INC, DEC в Cortex-M3 так же нет, но вместо них можно использовать инструкции "SUB Reg,#1" и "ADD reg,#1". Они занимают два байта вместе с операндом. Если операнд больше одного байта, то тут потребуется 32-битная инструкция.
5. В Thumb II есть режим индексной адресации с автоинкрементом и автодекриментом для инструкций LDR и STR:
LDR R0, [R1, #4]! ; пост инкремент : R1 += 4 после выполнения инструкции STR R0, [R1, #-4]! ; пост декремент : R1 -= 4 после выполнения инструкции
6. Указатель стека R13/SP выровнен по границе слова, т.е. его младшие два бита аппаратно сброшены в ноль. Указатель стека всегда указывает на последние сохраненные данные:
MOV SP, #0x20005000 ; инициализация SP
PUSH {R0} ; SP = 0x20004FFC, R0 сохранен по адресу [0x20004FFC]
PUSH {R1} ; SP = 0x20004FF8, R1 сохранен по адресу [0x20004FF8]
POP {R1} ; R1 = [0x20004FF8], SP = 0x20004FFC
7. Многие инструкции могут работать с группой регистров (reglist). Причем такие операции выполняются одной инструкцией. Например - сохранение контекста:
PUSH {R0-R7, LR} // сохраняем в стеке девять регистров
Или копирование блока памяти:
loop:
LDMIA R0!, {R1-R4}
STMIA R1!, {R1-R4}
SUBS R2, #16
BNE loop
8. С помощью суффиксов .b .h .w может указываться размер операнда: байт, полуслово или слово. Например:
LDRH R0, [R1] // Загрузка полуслова (16-бит) STRB.W R2, [R3, #4] // Сохранение байта (8-бит) с приведением к 32-битному виду
Но существуют инструкции с жестко прописанными размерами данных:
LDR = слово (32-бит) LDRH = полуслово (16-бит) LDRB = байт (8-битt)
9. С помощью условного выполнения, некоторые инструкция может быть выполнена или нет в зависимости от значений того или иного флага регистра состояний. В Thumb наборе инструкций, это применяется полько с инструкциями перехода, т.е. так образуются инструкции условного перехода. В наборе инструкций Thumb II с большинством логических и арифметических операций, суффиксы условного выполнения применяться не могут.


10. Добавление суффикса "S" (например ADDS, SUBS), указывает, что команда должна изменить флаги APSR: N, Z, C, V (разные инструкции влиют на разные флаги) на основе результата выполнения.
ADDS R0, R1, R2 ; Изменяет APSR флаги (N, Z, C, V) ADD R0, R1, R2 ; не изменяет флаги
Суффикс "S" работает с арифметическими и логическими операторами. Не работает с LDR, STR, B, BX, MSR, MRS. ИНструкции сравнения: CMP, CMN, TST, TEQ, всегда изменяют флаги состояния. Также всегда влиают на них некоторые 16-битные инструкции из набора Thumb-I, например: ADD/SUB. Пример использования суффикса S:
SUBS R0, R0, #1 ; R0=R0-1 BNE loop ; переход по метке если (R0 != 0)
11. В Thumb II наборе инструкций присутствует блок ветвления IT (If-Then), который призван реализовать небольшие ветвления, до 4-х инструкций, не прибегая к инструкциям ветвления и избегая сброса конвейера, т.к. каждый переход по метке влечет задержку в работе процессора на 2-3 машинных цикла. Он работает со статусными флагами: N (признак отрицательного числа), Z (признак нуля), C (перенос), V (переполнение) регистра APSR. Блок может выполняться с 16 суффиксами ветвления (EQ, NE, GT, LT, и др.).
Блок IT имеет следующий синтаксис:
IT{x{y{z}}} <условие>
где:
x - T(hen) или E(lse) для первой инструкции;
y - тоже самое для второй инструкции;
z - для третьей.
максимум - 4 инструкции.
Пример кода без IT блока
CMP R0, #10 ; выполняется за 1 машинный цикл BNE skip ; выполняется за 1 машинный цикл если R0 != 10, и выполняется за 3 машинных цикла, если осуществляется переход по метке. MOV R1, #100 ; 1 цикл skip:
Итого, данный код выполняется за 3 или 4 машинных цикла.
Тот же самый код с использованием IT блока:
CMP R0, #10 ; 1 цикл IT EQ ; 1 цикл MOVEQ R1, #100 ; 1 цикл, если R1 = 10
Итого: 2-3 машинных цикла.
12. Когда происходит прерывание или исключение, процессор автоматически сохраняет в стеке восемь регистров, процесс называется stacking " Coretx-M3 Technical Reference Manual - глава 5.5.1"
Сохраняются регистры: R0, R1, R2, R3, R12, LR, PC, xPSR. Регистр LR во время выполнения обработчика прерывания содержит адрес выхода из прерывания.
большие адреса
| xPSR |
| PC |
| LR |
| R12 |
| R3 |
| R2 |
| R1 |
| R0 | <-- SP after stacking
меньшие адреса
Остальные регистры следует сохранять вручную, если это требуется:
ISR_Handler:
PUSH {R4-R7, LR} ; Manual save (R4-R7 and LR if nested calls exist)
... ; ISR code
POP {R4-R7, PC} ; Restore and return (PC replaces LR)
13. Ассемблер ARM поддерживает несколько режимов адресации.
a) Регистровая адресация, когда операндами являются исключительно регистры R0-R15. Пример:
ADD R0, R1, R2 ; R0 = R1 + R2 (все операнды являются регистрами)
б) Непосредственная адресация, когда операнд указан в самой инструкции. При таком типе адресации не требуется обращения к памяти. Например:
MOV R0, #0xAB ; R0 = 0xAB (регистру R0 присваивается непосредственно само число стоящее в операнде) ADD R3, #10 ; R3 += 10
в) Прямая (абсолютная) адресация (англ. direct (absolute) addressing) - это режим адресации, в котором адрес данных указан напрямую, без использования каких-либо косвенных указаний или расчетов. Например:
LDR R0, =0x40021000 ; Загрузка значения находящегося в оперативной памяти по адресу 0x40021000 (например RCC register)
г) Косвенно-регистровая адресация (Register Indirect Addressing) - это режим адресации, при котором адрес операнда (данных) хранится в регистре процессора, а не непосредственно в поле адреса инструкции. Например:
LDR R0, [R1] ; регистру R0 присваивается значение хранящееся по адресу записаному в R1 STR R2, [R3] ; сохранение значения регистра R2 по адресу записаному в R3
д) Косвенно-регистровая адресация со смещением - это режим адресации, при котором к адресу операнда (данных) прибавляется какое-то смещение. Например:
LDR R0, [R1, #8] ; R0 = *(R1 + 8) STR R2, [R3, R4] ; Сохранение R2 по адресу (R3 + R4)
е) Пре-индексная адресация, когда индексный регистр предварительно увеличивается. Например:
LDR R0, [R1, #4]! ; раскладывается две операции: R1 += 4, и R0 = *R1
ё) Пост-индексная адресация, когда после операции индексный регистр увеличивается. Например:
LDR R0, [R1], #4 ; раскладывается также в две операции: R0 = *R1 и R1 += 4
ж) Адресация относительно регистра PC. В этом случае PC выступает как индексный регистр. Например:
LDR R0, [PC, #0x100] ; Загрузка в R0 значения по адресу (PC + 0x100)
з) Адресация относительно регистра SP. В этом случае SP выступает как индексный регистр. Например:
LDR R0, [SP, #8] ;Загрузка в R0 значения по адресу SP+8 STR R1, [SP, #-4]! ; Эквивалентно операции PUSH
Использование SP в качестве индексного довольно ограничено, если вы хотите что-то достать из стека, или изменить хранящиеся там данные, то следует SP скопировать в РОН и уже его использовать в качестве индексного. Например:
MOV R4, SP ; Копируем SP в R4 LDR R0, [R4, R2] ; Используем R4 как индексный
и) Адресация с блочной загрузкой-выгрузкой, когда в какой-то блок регистров загружается или выгружаются значения из памяти. Например:
LDMIA R0!, {R1-R4} ; Загрузка в R1-R4 значений из памяти, при этом R0 используется как индексный регистр с автоинкрементом, после выполнения инструкции его значение увеличится на 16, т.е. R0 += 16
STMDB SP!, {R5-R7} ; Аналог PUSH {R5-R7}
Если вам что-то было не понятно, вы можете почитать учебник Козаченко В.Ф.(ред.): "Практический курс микропроцессорной техники на базе процессорных ядер ARM-Cortex-M3/M4/M4F" 2019 М.: МЭИ, там очень дотошно всё разобрано.
4) Таблица векторов
Первоначальная версия программы успешно собралась только потому, что таблица векторов была размещена в самом начале программы, а проект состоял лишь из одного файла с исходным кодом.
Технически, можно отказаться как от использования ассемблера так и от размещения таблицы в "шапке" исходника. Для этого перепишем программу следующим образом:
#include "stm32f10x.h" #include "stm32f10x_gpio.h" #include "stm32f10x_rcc.h" #define WAIT 600000 void dummy_loop(volatile uint32_t count) { while (--count); } int main() { // Enable GPIOC clock RCC->APB2ENR |= RCC_APB2Periph_GPIOC; // Configure PC13 as push-pull output (max speed 2 MHz) GPIOC->CRH &= ~(GPIO_CRH_CNF13 | GPIO_CRH_MODE13); GPIOC->CRH |= GPIO_CRH_MODE13_1; // Output mode, max speed 2 MHz (0b10) // Super loop to toggle PC13 while (1) { GPIOC->BSRR = GPIO_Pin_13; // Set PC13 dummy_loop(WAIT); GPIOC->BRR = GPIO_Pin_13; // Reset PC13 dummy_loop(WAIT); } } void fault_irq() { while (1); } // Vector table (placed at 0x08000000 via linker script) __attribute__((section(".isr_vector"))) const void* vectors[] = { (void*)0x20005000, // Stack pointer (adjust based on your device's RAM size) (void*)(main + 1), // Reset handler (Thumb mode: address + 1) (void*)(fault_irq + 1), // NMI (void*)(fault_irq + 1), // HardFault (void*)(fault_irq + 1), // MemManage (void*)(fault_irq + 1), // BusFault (void*)(fault_irq + 1) // UsageFault };
Здесь заголовок прошивки был вынесен в отдельную секцию ".isr_vector". Теперь следует эту секцию указать в скрипте компоновщика. Для этого в блоке "SECTIONS", переж разделом ".text" разместить объявление новой секции:
/* Vector table at the start of ROM memory */ .isr_vector : { . = ALIGN(4); KEEP(*(.isr_vector)) /* IRQ vector table */ . = ALIGN(4); } >ROM
Под спойлером размещен полный вариант скрипта компоновщика.
показать/* Highest address of the user mode stack */ _estack = 0x20005000; /* end of RAM */ /* Memories definition */ MEMORY { RAM (xrw) : ORIGIN = 0x20000000, LENGTH = 20K ROM (rx) : ORIGIN = 0x8000000, LENGTH = 64K } /* Sections */ SECTIONS { /* Vector table at the start of ROM memory */ .isr_vector : { . = ALIGN(4); KEEP(*(.isr_vector)) /* IRQ vector table */ . = ALIGN(4); } >ROM /* The program code and other data into ROM memory */ .text : { . = ALIGN(4); *(.text) /* .text sections (code) */ } >ROM /* Constant data into ROM memory*/ .rodata : { . = ALIGN(4); *(.rodata) /* .rodata sections (constants, strings, etc.) */ } >ROM /* Initialized data sections into RAM memory */ .data : { . = ALIGN(4); *(.data) /* .data sections */ } >RAM AT> ROM /* Uninitialized data section into RAM memory */ . = ALIGN(4); .bss : { *(.bss) *(COMMON) . = ALIGN(4); _ebss = .; /* define a global symbol at bss end */ __bss_end__ = _ebss; } >RAM }
Теперь, после компиляции, утилита "size" выдаст такое распределение кода:
$ arm-none-eabi-size --format=berkeley firmware.elf
text data bss dec hex filename
80 28 0 108 6c firmware.elf
Размер прошивки не изменился - 108 байт, но 28 байт заголовка перешли из секции "text" в секцию "data". Теперь, если дизассемблировать прошивку командой "arm-none-eabi-objdump -S", то таблицу даже не покажет, т.к. это не код. Но в том, что заголовок прошивки скомпоновался по адресу "0x8000000", можно убедиться с помощью команд:
$ arm-none-eabi-objdump -h firmware.elf |head firmware.elf: file format elf32-littlearm Sections: Idx Name Size VMA LMA File off Algn 0 .isr_vector 0000001c 08000000 08000000 00010000 2**2 CONTENTS, ALLOC, LOAD, DATA 1 .text 00000000 0800001c 0800001c 0001001c 2**1 CONTENTS, ALLOC, LOAD, READONLY, CODE 2 .text.fault_irq 00000002 0800001c 0800001c 0001001c 2**1
или
$ arm-none-eabi-objdump -s -j .isr_vector firmware.elf
firmware.elf: file format elf32-littlearm
Contents of section .isr_vector:
8000000 00500020 31000008 1d000008 1d000008 .P. 1...........
8000010 1d000008 1d000008 1d000008 ............
или
$ xxd -g 4 firmware.bin | head
00000000: 00500020 31000008 1d000008 1d000008 .P. 1...........
00000010: 1d000008 1d000008 1d000008 fee782b0 ................
00000020: 0190019b 013b0193 002bfad1 02b07047 .....;...+....pG
00000030: 4ff40051 0b4a08b5 93690b48 43f01003 O..Q.J...i.HC...
00000040: 9361a2f5 80325368 23f47003 53605368 .a...2Sh#.p.S`Sh
00000050: 43f40013 53601161 fff7e1ff 5161fff7 C...S`.a....Qa..
00000060: defff8e7 00100240 c0270900 .......@.'..
Теперь можно вынести таблицу прерываний в отдельный модуль, и подключить его к проекту. Однако я предлагаю не изобретать велосипед, а привести проект, как принято говорить: "к стандартам принятым в индустрии".
В частности, я предлагаю подключить к проекту готовый "startup.s" - это ассемблерный файл, состоящий из полной таблицы прерываний STM32F103. С нашей стороны потребуется создание файлов с правилами сборки проекта Makefile, CMakeLists.txt и Qbs-скрипта.
В STM32F103 довольно обширная таблица прерываний, состоящая из 70-векторов обработчиков и еще шести зарезервированных (Reserved):
показать
Итого 76 * 4 = 304 байта. Я взял готовый "startup.s" из шаблонного проекта SW4STM32, который содержит полную таблицу векторов и стартовый код:
показать startup.s/** ****************************************************************************** * @file startup_stm32.s dedicated to STM32F103C8Tx device * @author Ac6 * @version V1.0.0 * @date 2021-06-30 ****************************************************************************** */ .syntax unified .cpu cortex-m3 .fpu softvfp .thumb .global g_pfnVectors .global Default_Handler /* start address for the initialization values of the .data section. defined in linker script */ .word _sidata /* start address for the .data section. defined in linker script */ .word _sdata /* end address for the .data section. defined in linker script */ .word _edata /* start address for the .bss section. defined in linker script */ .word _sbss /* end address for the .bss section. defined in linker script */ .word _ebss /** * @brief This is the code that gets called when the processor first * starts execution following a reset event. Only the absolutely * necessary set is performed, after which the application * supplied main() routine is called. * @param None * @retval : None */ .section .text.Reset_Handler .weak Reset_Handler .type Reset_Handler, %function Reset_Handler: ldr r0, =_estack mov sp, r0 /* set stack pointer */ /* Copy the data segment initializers from flash to SRAM */ ldr r0, =_sdata ldr r1, =_edata ldr r2, =_sidata movs r3, #0 b LoopCopyDataInit CopyDataInit: ldr r4, [r2, r3] str r4, [r0, r3] adds r3, r3, #4 LoopCopyDataInit: adds r4, r0, r3 cmp r4, r1 bcc CopyDataInit /* Zero fill the bss segment. */ ldr r2, =_sbss ldr r4, =_ebss movs r3, #0 b LoopFillZerobss FillZerobss: str r3, [r2] adds r2, r2, #4 LoopFillZerobss: cmp r2, r4 bcc FillZerobss /* Call the clock system intitialization function.*/ // bl SystemInit /* Call static constructors */ // bl __libc_init_array /* Call the application's entry point.*/ bl main LoopForever: b LoopForever .size Reset_Handler, .-Reset_Handler /** * @brief This is the code that gets called when the processor receives an * unexpected interrupt. This simply enters an infinite loop, preserving * the system state for examination by a debugger. * * @param None * @retval : None */ .section .text.Default_Handler,"ax",%progbits Default_Handler: Infinite_Loop: b Infinite_Loop .size Default_Handler, .-Default_Handler /****************************************************************************** * * The STM32F103C8Tx vector table. Note that the proper constructs * must be placed on this to ensure that it ends up at physical address * 0x0000.0000. * ******************************************************************************/ .section .isr_vector,"a",%progbits .type g_pfnVectors, %object .size g_pfnVectors, .-g_pfnVectors g_pfnVectors: .word _estack .word Reset_Handler .word NMI_Handler .word HardFault_Handler .word MemManage_Handler .word BusFault_Handler .word UsageFault_Handler .word 0 .word 0 .word 0 .word 0 .word SVC_Handler .word DebugMon_Handler .word 0 .word PendSV_Handler .word SysTick_Handler .word WWDG_IRQHandler /* Window Watchdog interrupt */ .word PVD_IRQHandler /* PVD through EXTI line detection interrupt */ .word TAMPER_IRQHandler /* Tamper interrupt */ .word RTC_IRQHandler /* RTC global interrupt */ .word FLASH_IRQHandler /* Flash global interrupt */ .word RCC_IRQHandler /* RCC global interrupt */ .word EXTI0_IRQHandler /* EXTI Line0 interrupt */ .word EXTI1_IRQHandler /* EXTI Line1 interrupt */ .word EXTI2_IRQHandler /* EXTI Line2 interrupt */ .word EXTI3_IRQHandler /* EXTI Line3 interrupt */ .word EXTI4_IRQHandler /* EXTI Line4 interrupt */ .word DMA1_Channel1_IRQHandler /* DMA1 Channel1 global interrupt */ .word DMA1_Channel2_IRQHandler /* DMA1 Channel2 global interrupt */ .word DMA1_Channel3_IRQHandler /* DMA1 Channel3 global interrupt */ .word DMA1_Channel4_IRQHandler /* DMA1 Channel4 global interrupt */ .word DMA1_Channel5_IRQHandler /* DMA1 Channel5 global interrupt */ .word DMA1_Channel6_IRQHandler /* DMA1 Channel6 global interrupt */ .word DMA1_Channel7_IRQHandler /* DMA1 Channel7 global interrupt */ .word ADC1_2_IRQHandler /* ADC1 and ADC2 global interrupt */ .word USB_HP_CAN_TX_IRQHandler /* USB High Priority or CAN TX interrupts */ .word USB_LP_CAN_RX0_IRQHandler /* USB Low Priority or CAN RX0 interrupts */ .word CAN_RX1_IRQHandler /* CAN RX1 interrupt */ .word CAN_SCE_IRQHandler /* CAN SCE interrupt */ .word EXTI9_5_IRQHandler /* EXTI Line[9:5] interrupts */ .word TIM1_BRK_IRQHandler /* TIM1 Break interrupt */ .word TIM1_UP_IRQHandler /* TIM1 Update interrupt */ .word TIM1_TRG_COM_IRQHandler /* TIM1 Trigger and Commutation interrupts */ .word TIM1_CC_IRQHandler /* TIM1 Capture Compare interrupt */ .word TIM2_IRQHandler /* TIM2 global interrupt */ .word TIM3_IRQHandler /* TIM3 global interrupt */ .word TIM4_IRQHandler /* TIM4 global interrupt */ .word I2C1_EV_IRQHandler /* I2C1 event interrupt */ .word I2C1_ER_IRQHandler /* I2C1 error interrupt */ .word I2C2_EV_IRQHandler /* I2C2 event interrupt */ .word I2C2_ER_IRQHandler /* I2C2 error interrupt */ .word SPI1_IRQHandler /* SPI1 global interrupt */ .word SPI2_IRQHandler /* SPI2 global interrupt */ .word USART1_IRQHandler /* USART1 global interrupt */ .word USART2_IRQHandler /* USART2 global interrupt */ .word USART3_IRQHandler /* USART3 global interrupt */ .word EXTI15_10_IRQHandler /* EXTI Line[15:10] interrupts */ .word RTCAlarm_IRQHandler /* RTC Alarms through EXTI line interrupt */ .word 0 /* Reserved */ .word TIM8_BRK_IRQHandler /* TIM8 Break interrupt */ .word TIM8_UP_IRQHandler /* TIM8 Update interrupt */ .word TIM8_TRG_COM_IRQHandler /* TIM8 Trigger and Commutation interrupts */ .word TIM8_CC_IRQHandler /* TIM8 Capture Compare interrupt */ .word ADC3_IRQHandler /* ADC3 global interrupt */ .word FSMC_IRQHandler /* FSMC global interrupt */ .word SDIO_IRQHandler /* SDIO global interrupt */ .word TIM5_IRQHandler /* TIM5 global interrupt */ .word SPI3_IRQHandler /* SPI3 global interrupt */ .word UART4_IRQHandler /* UART4 global interrupt */ .word UART5_IRQHandler /* UART5 global interrupt */ .word TIM6_IRQHandler /* TIM6 global interrupt */ .word TIM7_IRQHandler /* TIM7 global interrupt */ .word DMA2_Channel1_IRQHandler /* DMA2 Channel1 global interrupt */ .word DMA2_Channel2_IRQHandler /* DMA2 Channel2 global interrupt */ .word DMA2_Channel3_IRQHandler /* DMA2 Channel3 global interrupt */ .word DMA2_Channel4_5_IRQHandler /* DMA2 Channel4 and DMA2 Channel5 global interrupt */ /******************************************************************************* * * Provide weak aliases for each Exception handler to the Default_Handler. * As they are weak aliases, any function with the same name will override * this definition. * *******************************************************************************/ .weak NMI_Handler .thumb_set NMI_Handler,Default_Handler .weak HardFault_Handler .thumb_set HardFault_Handler,Default_Handler .weak MemManage_Handler .thumb_set MemManage_Handler,Default_Handler .weak BusFault_Handler .thumb_set BusFault_Handler,Default_Handler .weak UsageFault_Handler .thumb_set UsageFault_Handler,Default_Handler .weak SVC_Handler .thumb_set SVC_Handler,Default_Handler .weak DebugMon_Handler .thumb_set DebugMon_Handler,Default_Handler .weak PendSV_Handler .thumb_set PendSV_Handler,Default_Handler .weak SysTick_Handler .thumb_set SysTick_Handler,Default_Handler .weak WWDG_IRQHandler .thumb_set WWDG_IRQHandler,Default_Handler .weak PVD_IRQHandler .thumb_set PVD_IRQHandler,Default_Handler .weak TAMPER_IRQHandler .thumb_set TAMPER_IRQHandler,Default_Handler .weak RTC_IRQHandler .thumb_set RTC_IRQHandler,Default_Handler .weak FLASH_IRQHandler .thumb_set FLASH_IRQHandler,Default_Handler .weak RCC_IRQHandler .thumb_set RCC_IRQHandler,Default_Handler .weak EXTI0_IRQHandler .thumb_set EXTI0_IRQHandler,Default_Handler .weak EXTI1_IRQHandler .thumb_set EXTI1_IRQHandler,Default_Handler .weak EXTI2_IRQHandler .thumb_set EXTI2_IRQHandler,Default_Handler .weak EXTI3_IRQHandler .thumb_set EXTI3_IRQHandler,Default_Handler .weak EXTI4_IRQHandler .thumb_set EXTI4_IRQHandler,Default_Handler .weak DMA1_Channel1_IRQHandler .thumb_set DMA1_Channel1_IRQHandler,Default_Handler .weak DMA1_Channel2_IRQHandler .thumb_set DMA1_Channel2_IRQHandler,Default_Handler .weak DMA1_Channel3_IRQHandler .thumb_set DMA1_Channel3_IRQHandler,Default_Handler .weak DMA1_Channel4_IRQHandler .thumb_set DMA1_Channel4_IRQHandler,Default_Handler .weak DMA1_Channel5_IRQHandler .thumb_set DMA1_Channel5_IRQHandler,Default_Handler .weak DMA1_Channel6_IRQHandler .thumb_set DMA1_Channel6_IRQHandler,Default_Handler .weak DMA1_Channel7_IRQHandler .thumb_set DMA1_Channel7_IRQHandler,Default_Handler .weak ADC1_2_IRQHandler .thumb_set ADC1_2_IRQHandler,Default_Handler .weak USB_HP_CAN_TX_IRQHandler .thumb_set USB_HP_CAN_TX_IRQHandler,Default_Handler .weak USB_LP_CAN_RX0_IRQHandler .thumb_set USB_LP_CAN_RX0_IRQHandler,Default_Handler .weak CAN_RX1_IRQHandler .thumb_set CAN_RX1_IRQHandler,Default_Handler .weak CAN_SCE_IRQHandler .thumb_set CAN_SCE_IRQHandler,Default_Handler .weak EXTI9_5_IRQHandler .thumb_set EXTI9_5_IRQHandler,Default_Handler .weak TIM1_BRK_IRQHandler .thumb_set TIM1_BRK_IRQHandler,Default_Handler .weak TIM1_UP_IRQHandler .thumb_set TIM1_UP_IRQHandler,Default_Handler .weak TIM1_TRG_COM_IRQHandler .thumb_set TIM1_TRG_COM_IRQHandler,Default_Handler .weak TIM1_CC_IRQHandler .thumb_set TIM1_CC_IRQHandler,Default_Handler .weak TIM2_IRQHandler .thumb_set TIM2_IRQHandler,Default_Handler .weak TIM3_IRQHandler .thumb_set TIM3_IRQHandler,Default_Handler .weak TIM4_IRQHandler .thumb_set TIM4_IRQHandler,Default_Handler .weak I2C1_EV_IRQHandler .thumb_set I2C1_EV_IRQHandler,Default_Handler .weak I2C1_ER_IRQHandler .thumb_set I2C1_ER_IRQHandler,Default_Handler .weak I2C2_EV_IRQHandler .thumb_set I2C2_EV_IRQHandler,Default_Handler .weak I2C2_ER_IRQHandler .thumb_set I2C2_ER_IRQHandler,Default_Handler .weak SPI1_IRQHandler .thumb_set SPI1_IRQHandler,Default_Handler .weak SPI2_IRQHandler .thumb_set SPI2_IRQHandler,Default_Handler .weak USART1_IRQHandler .thumb_set USART1_IRQHandler,Default_Handler .weak USART2_IRQHandler .thumb_set USART2_IRQHandler,Default_Handler .weak USART3_IRQHandler .thumb_set USART3_IRQHandler,Default_Handler .weak EXTI15_10_IRQHandler .thumb_set EXTI15_10_IRQHandler,Default_Handler .weak RTCAlarm_IRQHandler .thumb_set RTCAlarm_IRQHandler,Default_Handler .weak TIM8_BRK_IRQHandler .thumb_set TIM8_BRK_IRQHandler,Default_Handler .weak TIM8_UP_IRQHandler .thumb_set TIM8_UP_IRQHandler,Default_Handler .weak TIM8_TRG_COM_IRQHandler .thumb_set TIM8_TRG_COM_IRQHandler,Default_Handler .weak TIM8_CC_IRQHandler .thumb_set TIM8_CC_IRQHandler,Default_Handler .weak ADC3_IRQHandler .thumb_set ADC3_IRQHandler,Default_Handler .weak FSMC_IRQHandler .thumb_set FSMC_IRQHandler,Default_Handler .weak SDIO_IRQHandler .thumb_set SDIO_IRQHandler,Default_Handler .weak TIM5_IRQHandler .thumb_set TIM5_IRQHandler,Default_Handler .weak SPI3_IRQHandler .thumb_set SPI3_IRQHandler,Default_Handler .weak UART4_IRQHandler .thumb_set UART4_IRQHandler,Default_Handler .weak UART5_IRQHandler .thumb_set UART5_IRQHandler,Default_Handler .weak TIM6_IRQHandler .thumb_set TIM6_IRQHandler,Default_Handler .weak TIM7_IRQHandler .thumb_set TIM7_IRQHandler,Default_Handler .weak DMA2_Channel1_IRQHandler .thumb_set DMA2_Channel1_IRQHandler,Default_Handler .weak DMA2_Channel2_IRQHandler .thumb_set DMA2_Channel2_IRQHandler,Default_Handler .weak DMA2_Channel3_IRQHandler .thumb_set DMA2_Channel3_IRQHandler,Default_Handler .weak DMA2_Channel4_5_IRQHandler .thumb_set DMA2_Channel4_5_IRQHandler,Default_Handler .weak SystemInit /************************ (C) COPYRIGHT Ac5 *****END OF FILE****/
Кроме таблицы векторов здесь содержится "стартовый" код который содержится в обработчике прерывания "Reset":
Reset_Handler: ldr r0, =_estack mov sp, r0 /* set stack pointer */ /* Copy the data segment initializers from flash to SRAM */ ldr r0, =_sdata ldr r1, =_edata ldr r2, =_sidata movs r3, #0 b LoopCopyDataInit CopyDataInit: ldr r4, [r2, r3] str r4, [r0, r3] adds r3, r3, #4 LoopCopyDataInit: adds r4, r0, r3 cmp r4, r1 bcc CopyDataInit /* Zero fill the bss segment. */ ldr r2, =_sbss ldr r4, =_ebss movs r3, #0 b LoopFillZerobss FillZerobss: str r3, [r2] adds r2, r2, #4 LoopFillZerobss: cmp r2, r4 bcc FillZerobss
Здесь два цикла. В первом цикле копируются данные из секции "data" в оперативную память, и тем самым, происходит инициализация глобальных переменных теми значениями, что были заданы в тексте программы. Второй цикл заполняет нулями bss секцию. В режиме отладки я запускал трассировку, и в случае данной программы, выполнение обоих циклов игнорировалось. После завершения стартового кода, происходит переход на функции SystemInit и __libc_init_array. Первая функция настраивает систему тактирования, которой пока в проекте нет, поэтому я ее закомментировал. Вторая функция находится в стандартной библиотеке, которой тоже нет, поэтому она тоже закомментирована. В финале, происходит переход на функцию "main".
Также я взял полный, неурезанный скрипт компоновщика:
показать stm32f10xx8.ld/* ****************************************************************************** ** ** File : LinkerScript.ld ** ** Author : Auto-generated by Ac6 System Workbench ** ** Abstract : Linker script for STM32F103C8Tx Device from STM32F1 series ** 20Kbytes RAM ** 64Kbytes ROM ** ** Set heap size, stack size and stack location according ** to application requirements. ** ** Set memory bank area and size if external memory is used. ** ** Target : STMicroelectronics STM32 ** ** Distribution: The file is distributed �as is,� without any warranty ** of any kind. ** ***************************************************************************** ** @attention ** ** <h2><center>© COPYRIGHT(c) 2021 Ac6</center></h2> ** ** Redistribution and use in source and binary forms, with or without modification, ** are permitted provided that the following conditions are met: ** 1. Redistributions of source code must retain the above copyright notice, ** this list of conditions and the following disclaimer. ** 2. Redistributions in binary form must reproduce the above copyright notice, ** this list of conditions and the following disclaimer in the documentation ** and/or other materials provided with the distribution. ** 3. Neither the name of Ac6 nor the names of its contributors ** may be used to endorse or promote products derived from this software ** without specific prior written permission. ** ** THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS "AS IS" ** AND ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT LIMITED TO, THE ** IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS FOR A PARTICULAR PURPOSE ARE ** DISCLAIMED. IN NO EVENT SHALL THE COPYRIGHT HOLDER OR CONTRIBUTORS BE LIABLE ** FOR ANY DIRECT, INDIRECT, INCIDENTAL, SPECIAL, EXEMPLARY, OR CONSEQUENTIAL ** DAMAGES (INCLUDING, BUT NOT LIMITED TO, PROCUREMENT OF SUBSTITUTE GOODS OR ** SERVICES; LOSS OF USE, DATA, OR PROFITS; OR BUSINESS INTERRUPTION) HOWEVER ** CAUSED AND ON ANY THEORY OF LIABILITY, WHETHER IN CONTRACT, STRICT LIABILITY, ** OR TORT (INCLUDING NEGLIGENCE OR OTHERWISE) ARISING IN ANY WAY OUT OF THE USE ** OF THIS SOFTWARE, EVEN IF ADVISED OF THE POSSIBILITY OF SUCH DAMAGE. ** ***************************************************************************** */ /* Entry Point */ ENTRY(Reset_Handler) /* Highest address of the user mode stack */ _estack = 0x20005000; /* end of 20K RAM */ _Min_Heap_Size = 0; /* required amount of heap */ _Min_Stack_Size = 0x100; /* required amount of stack */ /* Memories definition */ MEMORY { RAM (xrw) : ORIGIN = 0x20000000, LENGTH = 20K ROM (rx) : ORIGIN = 0x8000000, LENGTH = 64K } /* Sections */ SECTIONS { /* The startup code into ROM memory */ .isr_vector : { . = ALIGN(4); KEEP(*(.isr_vector)) /* Startup code */ . = ALIGN(4); } >ROM /* The program code and other data into ROM memory */ .text : { . = ALIGN(4); *(.text) /* .text sections (code) */ *(.text*) /* .text* sections (code) */ *(.glue_7) /* glue arm to thumb code */ *(.glue_7t) /* glue thumb to arm code */ *(.eh_frame) KEEP (*(.init)) KEEP (*(.fini)) . = ALIGN(4); _etext = .; /* define a global symbols at end of code */ } >ROM /* Constant data into ROM memory*/ .rodata : { . = ALIGN(4); *(.rodata) /* .rodata sections (constants, strings, etc.) */ *(.rodata*) /* .rodata* sections (constants, strings, etc.) */ . = ALIGN(4); } >ROM .ARM.extab : { . = ALIGN(4); *(.ARM.extab* .gnu.linkonce.armextab.*) . = ALIGN(4); } >ROM .ARM : { . = ALIGN(4); __exidx_start = .; *(.ARM.exidx*) __exidx_end = .; . = ALIGN(4); } >ROM .preinit_array : { . = ALIGN(4); PROVIDE_HIDDEN (__preinit_array_start = .); KEEP (*(.preinit_array*)) PROVIDE_HIDDEN (__preinit_array_end = .); . = ALIGN(4); } >ROM .init_array : { . = ALIGN(4); PROVIDE_HIDDEN (__init_array_start = .); KEEP (*(SORT(.init_array.*))) KEEP (*(.init_array*)) PROVIDE_HIDDEN (__init_array_end = .); . = ALIGN(4); } >ROM .fini_array : { . = ALIGN(4); PROVIDE_HIDDEN (__fini_array_start = .); KEEP (*(SORT(.fini_array.*))) KEEP (*(.fini_array*)) PROVIDE_HIDDEN (__fini_array_end = .); . = ALIGN(4); } >ROM /* Used by the startup to initialize data */ _sidata = LOADADDR(.data); /* Initialized data sections into RAM memory */ .data : { . = ALIGN(4); _sdata = .; /* create a global symbol at data start */ *(.data) /* .data sections */ *(.data*) /* .data* sections */ . = ALIGN(4); _edata = .; /* define a global symbol at data end */ } >RAM AT> ROM /* Uninitialized data section into RAM memory */ . = ALIGN(4); .bss : { /* This is used by the startup in order to initialize the .bss secion */ _sbss = .; /* define a global symbol at bss start */ __bss_start__ = _sbss; *(.bss) *(.bss*) *(COMMON) . = ALIGN(4); _ebss = .; /* define a global symbol at bss end */ __bss_end__ = _ebss; } >RAM /* User_heap_stack section, used to check that there is enough RAM left */ ._user_heap_stack : { . = ALIGN(8); PROVIDE ( end = . ); PROVIDE ( _end = . ); . = . + _Min_Heap_Size; . = . + _Min_Stack_Size; . = ALIGN(8); } >RAM /* Remove information from the compiler libraries*/ /DISCARD/ : { libc.a ( * ) libm.a ( * ) libgcc.a ( * ) } .ARM.attributes 0 : { *(.ARM.attributes) } }
Модуль "main.c" теперь будет выглядеть так:
#include "stm32f10x.h" #include "stm32f10x_gpio.h" #include "stm32f10x_rcc.h" #define WAIT 600000 void dummy_loop(volatile uint32_t count) { while (--count); } int main() { // Enable GPIOC clock RCC->APB2ENR |= RCC_APB2Periph_GPIOC; // Configure PC13 as push-pull output (max speed 2 MHz) GPIOC->CRH &= ~(GPIO_CRH_CNF13 | GPIO_CRH_MODE13); GPIOC->CRH |= GPIO_CRH_MODE13_1; // Output mode, max speed 2 MHz (0b10) // Super loop to toggle PC13 while (1) { GPIOC->BSRR = GPIO_Pin_13; // Set PC13 dummy_loop(WAIT); GPIOC->BRR = GPIO_Pin_13; // Reset PC13 dummy_loop(WAIT); } }
Итак, имеются файлы: "main.c", "startup.s" и "stm32f10xx8.ld". Теперь это все вместе надо собрать в единую прошивку. Сделать это можно разными способами.
Одной командой это делается довольно просто:
$ arm-none-eabi-gcc -T stm32f10xx8.ld -nostartfiles -mcpu=cortex-m3 -g -Os -mthumb -DSTM32F10X_MD -I ./CMSIS/device -I ./CMSIS/core -I ./SPL/inc -o firmware.elf main.c ./asm/startup.s s arm-none-eabi-objcopy -O binary firmware.elf firmware.bin $ arm-none-eabi-size ./firmware.elf text data bss dec hex filename 480 0 256 736 2e0 ./firmware.elf
Прошивка весит 480 байт, bss область в прошивку не входит, она располагается в оперативной памяти. Проверяем таблицу векторов:
$ arm-none-eabi-objdump -s -j .isr_vector firmware.elf
firmware.elf: file format elf32-littlearm
Contents of section .isr_vector:
8000000 00500020 95010008 dd010008 dd010008 .P. ............
8000010 dd010008 dd010008 dd010008 00000000 ................
8000020 00000000 00000000 00000000 dd010008 ................
8000030 dd010008 00000000 dd010008 dd010008 ................
8000040 dd010008 dd010008 dd010008 dd010008 ................
8000050 dd010008 dd010008 dd010008 dd010008 ................
8000060 dd010008 dd010008 dd010008 dd010008 ................
8000070 dd010008 dd010008 dd010008 dd010008 ................
8000080 dd010008 dd010008 dd010008 dd010008 ................
8000090 dd010008 dd010008 dd010008 dd010008 ................
80000a0 dd010008 dd010008 dd010008 dd010008 ................
80000b0 dd010008 dd010008 dd010008 dd010008 ................
80000c0 dd010008 dd010008 dd010008 dd010008 ................
80000d0 dd010008 dd010008 dd010008 dd010008 ................
80000e0 dd010008 dd010008 00000000 dd010008 ................
80000f0 dd010008 dd010008 dd010008 dd010008 ................
8000100 dd010008 dd010008 dd010008 dd010008 ................
8000110 dd010008 dd010008 dd010008 dd010008 ................
8000120 dd010008 dd010008 dd010008 dd010008 ................
0x130 - это 304 байта, на этот раз полная таблица векторов.
Для того, чтобы составлять скрипты сборки проекта, сперва следует уточнить структуру каталогов проекта. Я привык использовать следующую структуру проекта:
project/
├── main.c # в корне всегда файл "main.c"
├── Makefile
├── stm32f10xx8.ld
├── inc/
│ └── (заголовочные файлы)
├── src/
│ └── (остальные Си-файлы проекта)
└── asm/
└── (ассемблерные файлы проекта)
Самый простой Makefile для такого проекта у меня вышел следующим:
# Toolchain setup
CC = arm-none-eabi-gcc
AS = arm-none-eabi-gcc
OBJCOPY = arm-none-eabi-objcopy
SIZE = arm-none-eabi-size
RM = rm -f
# Target and output names
TARGET = firmware
BIN = $(TARGET).bin
HEX = $(TARGET).hex
ELF = $(TARGET).elf
# Directory structure
BUILD_DIR = build
SRC_DIR = src
ASM_DIR = asm
INC_DIR = inc
# Source files
SRCS_C = main.c
SRCS_C += $(wildcard $(SRC_DIR)/*.c)
SRCS_S = $(wildcard $(ASM_DIR)/*.s)
OBJS += $(patsubst $(SRC_DIR)/%.c,$(BUILD_DIR)/%.o,$(SRCS_C)) \
$(patsubst $(ASM_DIR)/%.s,$(BUILD_DIR)/%.o,$(SRCS_S))
# Include paths
INC = -I$(INC_DIR) -ICMSIS/device -ICMSIS/core -ISPL/inc
DEF = -DSTM32F10X_MD
# MCU and flags
MCU = cortex-m3
CFLAGS = -mcpu=$(MCU) -mthumb -Wall -g -Os -ffunction-sections -fdata-sections $(INC) $(DEF)
ASFLAGS = -mcpu=$(MCU) -mthumb -g
LDFLAGS = -T stm32f10xx8.ld -nostartfiles -Wl,--gc-sections -specs=nano.specs
# Build rules
all: $(BUILD_DIR)/$(BIN) $(BUILD_DIR)/$(HEX) size
$(BUILD_DIR)/$(ELF): $(OBJS)
@mkdir -p $(@D)
$(CC) $(CFLAGS) $^ -o $@ $(LDFLAGS)
# Rule for C files
$(BUILD_DIR)/%.o: $(SRC_DIR)/%.c
@mkdir -p $(@D)
$(CC) -c $(CFLAGS) $< -o $@
# Rule for assembly files
$(BUILD_DIR)/%.o: $(ASM_DIR)/%.s
@mkdir -p $(@D)
$(AS) -c $(ASFLAGS) $< -o $@
$(BUILD_DIR)/$(BIN): $(BUILD_DIR)/$(ELF)
$(OBJCOPY) -O binary $< $@
$(BUILD_DIR)/$(HEX): $(BUILD_DIR)/$(ELF)
$(OBJCOPY) -O ihex $< $@
size: $(BUILD_DIR)/$(ELF)
$(SIZE) --format=berkeley $<
flash: $(BUILD_DIR)/$(BIN)
st-flash write $< 0x08000000
clean:
$(RM) -r $(BUILD_DIR)
.PHONY: all size flash clean
Сборка:
$ make arm-none-eabi-gcc -c -mcpu=cortex-m3 -mthumb -g asm/startup.s -o build/startup.o arm-none-eabi-gcc -mcpu=cortex-m3 -mthumb -Wall -g -Os -ffunction-sections -fdata-sections -Iinc -ICMSIS/device -ICMSIS/core -ISPL/inc -DSTM32F10X_MD main.c build/startup.o -o build/firmware.elf -T stm32f10xx8.ld -nostartfiles -Wl,--gc-sections -specs=nano.specs arm-none-eabi-objcopy -O binary build/firmware.elf build/firmware.bin arm-none-eabi-objcopy -O ihex build/firmware.elf build/firmware.hex arm-none-eabi-size --format=berkeley build/firmware.elf text data bss dec hex filename 460 0 256 716 2cc build/firmware.elf
Здесь довольно странная конструкция получилась, когда смешана компиляция и компоновка. Я бы хотел, что бы компиляция и компоновка были разделены.
В конечном итоге, я остановился на следующем варианте Makefile:
# Toolchain setup
CC = arm-none-eabi-gcc
AS = arm-none-eabi-gcc
OBJCOPY = arm-none-eabi-objcopy
SIZE = arm-none-eabi-size
RM = rm -f
# Target and output names
TARGET = firmware
BIN = $(TARGET).bin
HEX = $(TARGET).hex
ELF = $(TARGET).elf
# Directory structure
BUILD_DIR = build
SRC_DIR = src
ASM_DIR = asm
INC_DIR = inc
PROJECT_ROOT = .
# Source files
SRCS_C = $(wildcard $(SRC_DIR)/*.c) $(wildcard $(PROJECT_ROOT)/main.c)
SRCS_S = $(wildcard $(ASM_DIR)/*.s)
OBJS = $(patsubst $(SRC_DIR)/%.c,$(BUILD_DIR)/%.o,$(filter $(SRC_DIR)/%,$(SRCS_C))) \
$(patsubst $(PROJECT_ROOT)/%.c,$(BUILD_DIR)/%.o,$(filter $(PROJECT_ROOT)/%,$(SRCS_C))) \
$(patsubst $(ASM_DIR)/%.s,$(BUILD_DIR)/%.o,$(SRCS_S))
# Include paths
INC = -I$(INC_DIR) -I$(PROJECT_ROOT) -ICMSIS/device -ICMSIS/core -ISPL/inc
DEF = -DSTM32F10X_MD
# MCU and flags
MCU = cortex-m3
CFLAGS = -mcpu=$(MCU) -mthumb -Wall -g -Os -ffunction-sections -fdata-sections $(INC) $(DEF)
ASFLAGS = -mcpu=$(MCU) -mthumb -g
LDFLAGS = -T stm32f10xx8.ld -nostartfiles -Wl,--gc-sections -specs=nano.specs
# Build rules
all: $(BUILD_DIR)/$(BIN) $(BUILD_DIR)/$(HEX) size
$(BUILD_DIR)/$(ELF): $(OBJS)
@mkdir -p $(@D)
$(CC) $(CFLAGS) $^ -o $@ $(LDFLAGS)
# Rule for C files in src directory
$(BUILD_DIR)/%.o: $(SRC_DIR)/%.c
@mkdir -p $(@D)
$(CC) -c $(CFLAGS) $< -o $@
# Rule for main.c in project root
$(BUILD_DIR)/%.o: $(PROJECT_ROOT)/%.c
@mkdir -p $(@D)
$(CC) -c $(CFLAGS) $< -o $@
# Rule for assembly files
$(BUILD_DIR)/%.o: $(ASM_DIR)/%.s
@mkdir -p $(@D)
$(AS) -c $(ASFLAGS) $< -o $@
$(BUILD_DIR)/$(BIN): $(BUILD_DIR)/$(ELF)
$(OBJCOPY) -O binary $< $@
$(BUILD_DIR)/$(HEX): $(BUILD_DIR)/$(ELF)
$(OBJCOPY) -O ihex $< $@
size: $(BUILD_DIR)/$(ELF)
$(SIZE) --format=berkeley $<
flash: $(BUILD_DIR)/$(BIN)
st-flash write $< 0x08000000
clean:
$(RM) -r $(BUILD_DIR)
.PHONY: all size flash clean
Makefile будет примерно в два раза меньше, если все исходники хранить в "src" каталоге, но как я говорил, я привык именно к такой структуре проекта:
project/
├── main.c # в корне всегда файл "main.c"
├── Makefile
├── stm32f10xx8.ld
├── inc/
│ └── (заголовочные файлы)
├── src/
│ └── (остальные Си-файлы проекта)
└── asm/
└── (ассемблерные файлы проекта)
Сборка проекта:
$ make clean && make
rm -f -r build
arm-none-eabi-gcc -c -mcpu=cortex-m3 -mthumb -g asm/startup.s -o build/startup.o
arm-none-eabi-gcc -c -mcpu=cortex-m3 -mthumb -Wall -g -Os -ffunction-sections -fdata-sections -Iinc -I. -ICMSIS/device -ICMSIS/core -ISPL/inc -DSTM32F10X_MD main.c -o build/main.o
arm-none-eabi-gcc -mcpu=cortex-m3 -mthumb -Wall -g -Os -ffunction-sections -fdata-sections -Iinc -I. -ICMSIS/device -ICMSIS/core -ISPL/inc -DSTM32F10X_MD build/main.o build/startup.o -o build/firmware.elf -T stm32f10xx8.ld -nostartfiles -Wl,--gc-sections -specs=nano.specs
arm-none-eabi-objcopy -O binary build/firmware.elf build/firmware.bin
arm-none-eabi-objcopy -O ihex build/firmware.elf build/firmware.hex
arm-none-eabi-size --format=berkeley build/firmware.elf
text data bss dec hex filename
460 0 256 716 2cc build/firmware.elf
В этот раз все нормально, все модули собираются по отдельности, после чего происходит компоновка.
CMakeLists.txt для сборки проекта посредством CMake:
cmake_minimum_required(VERSION 3.12) project(firmware LANGUAGES C ASM) set(CMAKE_VERBOSE_MAKEFILE OFF) # Toolchain setup set(CMAKE_SYSTEM_NAME Generic) set(CMAKE_SYSTEM_PROCESSOR arm) set(CMAKE_C_COMPILER arm-none-eabi-gcc) set(CMAKE_ASM_COMPILER arm-none-eabi-gcc) set(CMAKE_OBJCOPY arm-none-eabi-objcopy) set(CMAKE_SIZE arm-none-eabi-size) # Target and output names set(TARGET firmware) set(ELF ${TARGET}.elf) set(BIN ${TARGET}.bin) set(HEX ${TARGET}.hex) # Directory structure set(BUILD_DIR ${CMAKE_BINARY_DIR}) set(SRC_DIR src) set(ASM_DIR asm) set(INC_DIR inc) # Source files file(GLOB SRCS_C ${SRC_DIR}/*.c ${CMAKE_SOURCE_DIR}/main.c ) file(GLOB SRCS_S ${ASM_DIR}/*.s) # Include paths set(INC ${INC_DIR} CMSIS/device CMSIS/core SPL/inc ) # Compiler definitions add_definitions(-DSTM32F10X_MD) # MCU and flags set(MCU cortex-m3) set(CWARN "-Wall") set(CMAKE_C_FLAGS "-mcpu=${MCU} -mthumb ${CWARN} -g -Os -ffunction-sections -fdata-sections") set(CMAKE_ASM_FLAGS "-mcpu=${MCU} -mthumb -g") set(LINKER_SCRIPT "${CMAKE_SOURCE_DIR}/stm32f10xx8.ld") set(CMAKE_EXE_LINKER_FLAGS "-nostartfiles -specs=nano.specs -T${LINKER_SCRIPT} -Wl,--gc-sections") # Create executable add_executable(${ELF} ${SRCS_C} ${SRCS_S}) target_include_directories(${ELF} PRIVATE ${INC}) # Generate binary and hex files add_custom_command(TARGET ${ELF} POST_BUILD COMMAND ${CMAKE_OBJCOPY} -O binary ${ELF} ${BIN} COMMAND ${CMAKE_OBJCOPY} -O ihex ${ELF} ${HEX} COMMENT "Generating ${BIN} and ${HEX}" ) # Size target add_custom_target(size COMMAND ${CMAKE_SIZE} --format=berkeley ${ELF} DEPENDS ${ELF} ) # Flash target add_custom_target(flash COMMAND st-flash write ${BIN} 0x08000000 DEPENDS ${BIN} ) # Install target (optional) install(FILES ${BIN} DESTINATION bin)
Сборка проекта посредством CMake:
$ mkdir cbuild && cd $_ $ cmake .. $ make && make size
Прошивка:
$ make flash

Под спойлером выкладываю скрипт для сборки проекта посредством Qbs:
показать Qbs-скрипт
import qbs
Product {
type: ["application","flash"]
Depends { name: "cpp" }
name: "firmware"
property string Home: sourceDirectory
property string Inc: Home + "/inc"
property string Asm: Home + "/asm"
cpp.positionIndependentCode: false
cpp.executableSuffix: ".elf"
cpp.includePaths:[
"CMSIS/device",
"CMSIS/core",
"SPL/inc",
"inc",
]
cpp.driverFlags: [
"-nostartfiles",
"-specs=nano.specs",
]
cpp.linkerFlags:
[
"--gc-sections",
"-T" + sourceDirectory + "/stm32f10xx8.ld",
]
cpp.cFlags: [
"-mthumb",
"-mcpu=cortex-m3",
"-Wall",
]
cpp.defines: [
"STM32F10X_MD",
]
Properties
{
condition: qbs.buildVariant === "debug"
cpp.defines: outer.concat(["DEBUG=1"])
cpp.debugInformation: true
cpp.optimization: "debug"
cpp.cFlags: outer.concat(["-ggdb"])
}
Properties
{
condition: qbs.buildVariant === "release"
cpp.debugInformation: false
cpp.optimization: "small"
}
Group {
name: "Headers"
files: [
Inc + "/*.h",
]
fileTags: ["h_src"]
}
Group {
name: "Assembly"
fileTags: ["asm"]
files: [
Asm + "/*.s",
]
}
files: [
"main.c",
]
Rule
{
inputs: ["application"]
Artifact
{
filePath: product.name + ".bin"
fileTags: "flash"
}
prepare:
{
var size_name=input.filePath
var argsObjcopy = ["-O", "binary", input.filePath, output.filePath]
var cmd_bin=new Command("arm-none-eabi-objcopy",argsObjcopy)
var cmd_size=new Command("arm-none-eabi-size",size_name)
cmd_bin.description = "Generating binary: " + output.fileName
cmd_size.description = "Size of " + output.fileName
return [cmd_bin,cmd_size]
}
}
}
Сборка с помощь команды:
$ qbs build config:release profile:arm-none-eabi-gcc-10_3 --command-echo-mode command-line
Build graph does not yet exist for configuration 'release'. Starting from scratch.
Resolving project for configuration release
WARNING: Could not detect target platform ('linux' given)
Setting up build graph for configuration release
Building for configuration release
/usr/local/bin/arm-none-eabi-as -I/home/flanker/qtcreator_projects/00_blink_148/CMSIS/device -I/home/flanker/qtcreator_projects/00_blink_148/CMSIS/core -I/home/flanker/qtcreator_projects/00_blink_148/SPL/inc -I/home/flanker/qtcreator_projects/00_blink_148/inc -o /home/flanker/qtcreator_projects/00_blink_148/release/firmware.9bcf18e4/2445be8241aabd34/startup.s.o /home/flanker/qtcreator_projects/00_blink_148/asm/startup.s
/usr/local/bin/arm-none-eabi-gcc -Os -Wall -Wextra -nostartfiles -specs=nano.specs -pipe -fvisibility=default -mthumb -mcpu=cortex-m3 -Wall -DNDEBUG -DSTM32F10X_MD -I/home/flanker/qtcreator_projects/00_blink_148/CMSIS/device -I/home/flanker/qtcreator_projects/00_blink_148/CMSIS/core -I/home/flanker/qtcreator_projects/00_blink_148/SPL/inc -I/home/flanker/qtcreator_projects/00_blink_148/inc -o /home/flanker/qtcreator_projects/00_blink_148/release/firmware.9bcf18e4/3a52ce780950d4d9/main.c.o -c /home/flanker/qtcreator_projects/00_blink_148/main.c
/usr/local/bin/arm-none-eabi-gcc -Wl,--gc-sections,-T/home/flanker/qtcreator_projects/00_blink_148/stm32f10xx8.ld -nostartfiles -specs=nano.specs -o /home/flanker/qtcreator_projects/00_blink_148/release/firmware.9bcf18e4/firmware.elf /home/flanker/qtcreator_projects/00_blink_148/release/firmware.9bcf18e4/2445be8241aabd34/startup.s.o /home/flanker/qtcreator_projects/00_blink_148/release/firmware.9bcf18e4/3a52ce780950d4d9/main.c.o
/usr/local/bin/arm-none-eabi-objcopy -O binary /home/flanker/qtcreator_projects/00_blink_148/release/firmware.9bcf18e4/firmware.elf /home/flanker/qtcreator_projects/00_blink_148/release/firmware.9bcf18e4/firmware.bin
/usr/local/bin/arm-none-eabi-size /home/flanker/qtcreator_projects/00_blink_148/release/firmware.9bcf18e4/firmware.elf
Build done for configuration release.
/usr/local/bin/arm-none-eabi-size /home/flanker/qtcreator_projects/00_blink_148/release/firmware.9bcf18e4/firmware.elf
text data bss dec hex filename
460 0 256 716 2cc /home/flanker/qtcreator_projects/00_blink_148/release/firmware.9bcf18e4/firmware.elf
5) Настройка системы тактирования - RCC (Reset and Clock Control)
После добавления таблицы прерываний необходимо настроить систему тактирования. Для микроконтроллера STM32F103C8 она выглядит следующим образом:

Вообще-то, в шаблонном проекте TrueStudio у нас уже была настроена система тактирования RCC, хоть мы к этому и не приложили ни капли усилий. С помощью добрых глаз и дизассемблера, мне удалось выяснить, что функции настройки RCC содержатся в файле system_stm32f10x.c:

Настройка системы тактирования начинается с вызова функции SystemInit(). В каталоге проекта "src", откроем новый файл system_init.c. В этот файл мы и скопируем функцию SystemInit():
#include "stm32f10x.h" #include "stm32f10x_gpio.h" #include "stm32f10x_rcc.h" void SystemInit (void) { RCC->CR |= (uint32_t)0x00000001; // enable HSI, 8 MHz /* Reset SW, HPRE, PPRE1, PPRE2, ADCPRE and MCO bits */ #ifndef STM32F10X_CL RCC->CFGR &= (uint32_t)0xF8FF0000; #else RCC->CFGR &= (uint32_t)0xF0FF0000; #endif /* STM32F10X_CL */ /* Reset HSEON, CSSON and PLLON bits */ RCC->CR &= (uint32_t)0xFEF6FFFF; /* Reset HSEBYP bit */ RCC->CR &= (uint32_t)0xFFFBFFFF; /* Reset PLLSRC, PLLXTPRE, PLLMUL and USBPRE/OTGFSPRE bits */ RCC->CFGR &= (uint32_t)0xFF80FFFF; #ifdef STM32F10X_CL /* Reset PLL2ON and PLL3ON bits */ RCC->CR &= (uint32_t)0xEBFFFFFF; /* Disable all interrupts and clear pending bits */ RCC->CIR = 0x00FF0000; /* Reset CFGR2 register */ RCC->CFGR2 = 0x00000000; #elif defined (STM32F10X_LD_VL) || defined (STM32F10X_MD_VL) || (defined STM32F10X_HD_VL) /* Disable all interrupts and clear pending bits */ RCC->CIR = 0x009F0000; /* Reset CFGR2 register */ RCC->CFGR2 = 0x00000000; #else /* Disable all interrupts and clear pending bits */ RCC->CIR = 0x009F0000; #endif /* STM32F10X_CL */ #if defined (STM32F10X_HD) || (defined STM32F10X_XL) || (defined STM32F10X_HD_VL) #ifdef DATA_IN_ExtSRAM SystemInit_ExtMemCtl(); #endif /* DATA_IN_ExtSRAM */ #endif /* Configure the System clock frequency, HCLK, PCLK2 and PCLK1 prescalers */ /* Configure the Flash Latency cycles and enable prefetch buffer */ // SetSysClock(); #ifdef SYSCLK_FREQ_HSE SetSysClockToHSE(); #elif defined SYSCLK_FREQ_24MHz SetSysClockTo24(); #elif defined SYSCLK_FREQ_36MHz SetSysClockTo36(); #elif defined SYSCLK_FREQ_48MHz SetSysClockTo48(); #elif defined SYSCLK_FREQ_56MHz SetSysClockTo56(); #elif defined SYSCLK_FREQ_72MHz SetSysClockTo72(); #endif #ifdef VECT_TAB_SRAM SCB->VTOR = SRAM_BASE | VECT_TAB_OFFSET; /* Vector Table Relocation in Internal SRAM. */ #else // SCB->VTOR = FLASH_BASE | VECT_TAB_OFFSET; /* Vector Table Relocation in Internal FLASH. */ #endif }
Данная функция сбрасывает систему тактирования, т.е. делает то, что и так должно происходить после RESET. В завершении работы, в зависимости от флагов компиляции, включается вызов функций для настройки тактирования.
Мы будем использовать другую функцию: void SetSysClockTo72(). Эта функция сначала переключается на внешний кварц, затем запускает PLL-генератор, после его стабилизации устанавливается PLL-множитель на 9, в результате чего частота SYSCLK устанавливается в значение 72 MHz. Далее устанавливаются делители: для AHB и APB2 шин по единице, для APB1 шины равной двум, т.е. на 36МГц. Кроме того для флеш-памяти устанавливается WaitState равный двум, т.е. флеш-память работает на меньшей частоте чем процессор. Но давайте по порядку.
1. В начале запускается внешний кварц:
/* SYSCLK, HCLK, PCLK2 and PCLK1 configuration ---------------------------*/ /* Enable HSE */ RCC->CR |= ((uint32_t)RCC_CR_HSEON); /* Wait till HSE is ready and if Time out is reached exit */ do { HSEStatus = RCC->CR & RCC_CR_HSERDY; StartUpCounter++; } while((HSEStatus == 0) && (StartUpCounter != HSE_STARTUP_TIMEOUT));
Ниже приведено описание конфигурационного регистра RCC_CR:

Здесь HSION - включает/выключает внутренний 8 МГц генератор. Внутренний генератор невозможно выключить когда от него тактируется SYSCLK. Этот бит аппаратно устанавливается когда микроконтроллер выходит из Stop и Standby режимов или когда перестают поступать сигналы с внешнего генератора. HDIRDY - флаг готовности HSI генератора. HSITRIM и HSICAL - отвечают за подстройку частоты HSI.
HSEON - включает/выключает генератор работающий от внешнего кварца. Не может быть выключен когда от него тактируется SYSCLK. Аппаратно очищается при переходе микроконтроллера в Stop и Standby режимы. HSERDY - флаг готовности генератора. НSEBYP - разрешает работу от внешнего генератора (не путать с кварцем!). Внешний генератор должен быть в диапазоне 4-16 МГц. HSEBYP не может быть установлен если запущен HSE. HSEBYP должен устанавливаться вместе с HSEON битом.
СSSON - включает систему безопасности тактирования. PLLON - включает PLL генератор. Очищается аппаратно при переходе микроконтроллера в Stop и Standby режимы. PLLON не может быть очищен когда используется для тактирования SYSCLK. PLLRDY флаг готовности PLL-генератора.
Т.о. сначала включается HSE генератор, после чего некоторое время ожидается пока он стабилизируется.
Идем далее:
/* Enable Prefetch Buffer */ FLASH->ACR |= FLASH_ACR_PRFTBE; /* Flash 2 wait state */ FLASH->ACR &= (uint32_t)((uint32_t)~FLASH_ACR_LATENCY); FLASH->ACR |= (uint32_t)FLASH_ACR_LATENCY_2;
Здесь включается буфер превыборки и устанавливается время обращения к флеш-памяти. Описание регистра FLASH_ACR приведено ниже:

Здесь Latency задает задержку при обращении к флеш-памяти. Для частоты SYSCLK=72MHz, следует ставить задержку в два такта. HLFCYA разрешает обращение к 16-битным данным, что помогает улучшить быстродействие при частотах 8 MHz и ниже. Его нельзя использовать совместно с PLL. PRFTBE включает буфер превыборки команд, PRFTBS - флаг буфера превыборки.
/* HCLK = SYSCLK */ RCC->CFGR |= (uint32_t)RCC_CFGR_HPRE_DIV1; /* PCLK2 = HCLK */ RCC->CFGR |= (uint32_t)RCC_CFGR_PPRE2_DIV1; /* PCLK1 = HCLK */ RCC->CFGR |= (uint32_t)RCC_CFGR_PPRE1_DIV2;
Здесь на шины AHB и APB2 устанавливаются предделители равные единице. На шину APB1 устанавливается предделитель равный двум.

Здесь SW переключает генератор тактирования SYSCLK. SWS - флаг завершения переключения на новый генератор SYSCLK. HPRE - устанавливает предделитель на AHB шину. PPRE1 устанавливает предделитель на шину APB1. PPRE2 устанавливает предделитель на шину APB2. ADCPRE устанавливает предделитель на АЦП. PLLSRC - выбирает источник опорного тактирования: HSI или HSE. PLLXTPRE - устанавливает предделитель на PLL. PLLMUL - устанавливает множитель на PLL. USBPRE - устанавливает предделитель на USB шину. MCO - выбирает источник выходного тактового сигнала.
Т.о. в следующем коде выбирается HSE в качестве опорного источника тактирования, и устанавливается множитель равный девяти. Т.к. на плате "Blue Pill" установлен кварц на 8 MHz, то умножив это число на 9, получим в итоге частоту SYSCLK = 72 MHz.
/* PLL configuration: PLLCLK = HSE * 9 = 72 MHz */ RCC->CFGR &= (uint32_t)((uint32_t)~(RCC_CFGR_PLLSRC | RCC_CFGR_PLLXTPRE | RCC_CFGR_PLLMULL)); RCC->CFGR |= (uint32_t)(RCC_CFGR_PLLSRC_HSE | RCC_CFGR_PLLMULL9);
Далее включается PLL и ожидается его готовность:
/* Enable PLL */ RCC->CR |= RCC_CR_PLLON; /* Wait till PLL is ready */ while((RCC->CR & RCC_CR_PLLRDY) == 0) { }
В завершении, тактирование SYSCLK переключается на PLL:
/* Select PLL as system clock source */ RCC->CFGR &= (uint32_t)((uint32_t)~(RCC_CFGR_SW)); RCC->CFGR |= (uint32_t)RCC_CFGR_SW_PLL; /* Wait till PLL is used as system clock source */ while ((RCC->CFGR & (uint32_t)RCC_CFGR_SWS) != (uint32_t)0x08) { }
Во всем этом хозяйстве не хватает кода включения CSS и генератора низкочастотного генератора LSE, но для начала наверно сойдет. Полностью код файла startup.c можно посмотреть под спойлером, или в архиве в конце статьи.
показать startup.c#include "stm32f10x.h" #include "stm32f10x_gpio.h" #include "stm32f10x_rcc.h" #ifdef SYSCLK_FREQ_HSE /** * @brief Selects HSE as System clock source and configure HCLK, PCLK2 * and PCLK1 prescalers. * @note This function should be used only after reset. * @param None * @retval None */ static void SetSysClockToHSE(void) { __IO uint32_t StartUpCounter = 0, HSEStatus = 0; /* SYSCLK, HCLK, PCLK2 and PCLK1 configuration ---------------------------*/ /* Enable HSE */ RCC->CR |= ((uint32_t)RCC_CR_HSEON); /* Wait till HSE is ready and if Time out is reached exit */ do { HSEStatus = RCC->CR & RCC_CR_HSERDY; StartUpCounter++; } while((HSEStatus == 0) && (StartUpCounter != HSE_STARTUP_TIMEOUT)); if ((RCC->CR & RCC_CR_HSERDY) != RESET) { HSEStatus = (uint32_t)0x01; } else { HSEStatus = (uint32_t)0x00; } if (HSEStatus == (uint32_t)0x01) { #if !defined STM32F10X_LD_VL && !defined STM32F10X_MD_VL && !defined STM32F10X_HD_VL /* Enable Prefetch Buffer */ FLASH->ACR |= FLASH_ACR_PRFTBE; /* Flash 0 wait state */ FLASH->ACR &= (uint32_t)((uint32_t)~FLASH_ACR_LATENCY); #ifndef STM32F10X_CL FLASH->ACR |= (uint32_t)FLASH_ACR_LATENCY_0; #else if (HSE_VALUE <= 24000000) { FLASH->ACR |= (uint32_t)FLASH_ACR_LATENCY_0; } else { FLASH->ACR |= (uint32_t)FLASH_ACR_LATENCY_1; } #endif /* STM32F10X_CL */ #endif /* HCLK = SYSCLK */ RCC->CFGR |= (uint32_t)RCC_CFGR_HPRE_DIV1; /* PCLK2 = HCLK */ RCC->CFGR |= (uint32_t)RCC_CFGR_PPRE2_DIV1; /* PCLK1 = HCLK */ RCC->CFGR |= (uint32_t)RCC_CFGR_PPRE1_DIV1; /* Select HSE as system clock source */ RCC->CFGR &= (uint32_t)((uint32_t)~(RCC_CFGR_SW)); RCC->CFGR |= (uint32_t)RCC_CFGR_SW_HSE; /* Wait till HSE is used as system clock source */ while ((RCC->CFGR & (uint32_t)RCC_CFGR_SWS) != (uint32_t)0x04) { } } else { /* If HSE fails to start-up, the application will have wrong clock configuration. User can add here some code to deal with this error */ } } #elif defined SYSCLK_FREQ_72MHz /** * @brief Sets System clock frequency to 72MHz and configure HCLK, PCLK2 * and PCLK1 prescalers. * @note This function should be used only after reset. * @param None * @retval None */ static void SetSysClockTo72(void) { /* SYSCLK, HCLK, PCLK2 and PCLK1 configuration ---------------------------*/ /* Enable HSE */ RCC->CR |= ((uint32_t)RCC_CR_HSEON); /* Wait till HSE is ready and if Time out is reached exit */ while (!(RCC->CR & RCC_CR_HSERDY)) /* Enable Prefetch Buffer */ FLASH->ACR |= FLASH_ACR_PRFTBE; /* Flash 2 wait state */ FLASH->ACR &= (uint32_t)((uint32_t)~FLASH_ACR_LATENCY); FLASH->ACR |= (uint32_t)FLASH_ACR_LATENCY_2; /* HCLK = SYSCLK */ RCC->CFGR |= (uint32_t)RCC_CFGR_HPRE_DIV1; /* PCLK2 = HCLK */ RCC->CFGR |= (uint32_t)RCC_CFGR_PPRE2_DIV1; /* PCLK1 = HCLK */ RCC->CFGR |= (uint32_t)RCC_CFGR_PPRE1_DIV2; /* PLL configuration: PLLCLK = HSE * 9 = 72 MHz */ RCC->CFGR &= (uint32_t)((uint32_t)~(RCC_CFGR_PLLSRC | RCC_CFGR_PLLXTPRE | RCC_CFGR_PLLMULL)); RCC->CFGR |= (uint32_t)(RCC_CFGR_PLLSRC_HSE | RCC_CFGR_PLLMULL9); /* Enable PLL */ RCC->CR |= RCC_CR_PLLON; /* Wait till PLL is ready */ while(!(RCC->CR & RCC_CR_PLLRDY)); /* Select PLL as system clock source */ RCC->CFGR &= (uint32_t)((uint32_t)~(RCC_CFGR_SW)); RCC->CFGR |= (uint32_t)RCC_CFGR_SW_PLL; /* Wait till PLL is used as system clock source */ while ((RCC->CFGR & (uint32_t)RCC_CFGR_SWS) != (uint32_t)0x08); } #endif void SystemInit (void) { RCC->CR |= (uint32_t)0x00000001; // enable HSI, 8 MHz /* Reset SW, HPRE, PPRE1, PPRE2, ADCPRE and MCO bits */ #ifndef STM32F10X_CL RCC->CFGR &= (uint32_t)0xF8FF0000; #else RCC->CFGR &= (uint32_t)0xF0FF0000; #endif /* STM32F10X_CL */ /* Reset HSEON, CSSON and PLLON bits */ RCC->CR &= (uint32_t)0xFEF6FFFF; /* Reset HSEBYP bit */ RCC->CR &= (uint32_t)0xFFFBFFFF; /* Reset PLLSRC, PLLXTPRE, PLLMUL and USBPRE/OTGFSPRE bits */ RCC->CFGR &= (uint32_t)0xFF80FFFF; #ifdef STM32F10X_CL /* Reset PLL2ON and PLL3ON bits */ RCC->CR &= (uint32_t)0xEBFFFFFF; /* Disable all interrupts and clear pending bits */ RCC->CIR = 0x00FF0000; /* Reset CFGR2 register */ RCC->CFGR2 = 0x00000000; #elif defined (STM32F10X_LD_VL) || defined (STM32F10X_MD_VL) || (defined STM32F10X_HD_VL) /* Disable all interrupts and clear pending bits */ RCC->CIR = 0x009F0000; /* Reset CFGR2 register */ RCC->CFGR2 = 0x00000000; #else /* Disable all interrupts and clear pending bits */ RCC->CIR = 0x009F0000; #endif /* STM32F10X_CL */ #if defined (STM32F10X_HD) || (defined STM32F10X_XL) || (defined STM32F10X_HD_VL) #ifdef DATA_IN_ExtSRAM SystemInit_ExtMemCtl(); #endif /* DATA_IN_ExtSRAM */ #endif /* Configure the System clock frequency, HCLK, PCLK2 and PCLK1 prescalers */ /* Configure the Flash Latency cycles and enable prefetch buffer */ // SetSysClock(); #ifdef SYSCLK_FREQ_HSE SetSysClockToHSE(); #elif defined SYSCLK_FREQ_24MHz SetSysClockTo24(); #elif defined SYSCLK_FREQ_36MHz SetSysClockTo36(); #elif defined SYSCLK_FREQ_48MHz SetSysClockTo48(); #elif defined SYSCLK_FREQ_56MHz SetSysClockTo56(); #elif defined SYSCLK_FREQ_72MHz SetSysClockTo72(); #endif #ifdef VECT_TAB_SRAM SCB->VTOR = SRAM_BASE | VECT_TAB_OFFSET; /* Vector Table Relocation in Internal SRAM. */ #else // SCB->VTOR = FLASH_BASE | VECT_TAB_OFFSET; /* Vector Table Relocation in Internal FLASH. */ #endif }
Данный файл следует разместить в каталоге проекта "src". В обработчике прерывания Reset (файл startup.s) следует раскомментировать вызов функции SystemInit:
bl SystemInitВ Makefile нужно добавить define:
DEF += -DSYSCLK_FREQ_72MHz
Тоже самое в "CMakeLists.txt"
add_definitions(-DSTM32F10X_MD -DSYSCLK_FREQ_72MHz)
Самые большие изменения в Qbs скрипте, там кроме дефйна нужно еще добавить группу для src файлов. Патч:
$ diff -Naur 00_blink_148.qbs ~/mydev/mcu/f103_25/02_blink_project/00_blink_148.qbs --- 00_blink_148.qbs 2025-05-29 09:37:37.000000000 +0400 +++ /home/flanker/mydev/mcu/f103_25/02_blink_project/00_blink_148.qbs 2025-05-27 16:08:04.000000000 +0400 @@ -7,7 +7,6 @@ property string Home: sourceDirectory property string Inc: Home + "/inc" - property string Src: Home + "/src" property string Asm: Home + "/asm" cpp.positionIndependentCode: false @@ -39,7 +38,6 @@ cpp.defines: [ "STM32F10X_MD", - "SYSCLK_FREQ_72MHz", ] Properties @@ -74,13 +72,6 @@ ] } - Group { - name: "Src" - files: [ - Src + "/*.c", - ] - } - files: [ "main.c", ]
Сборка:
$ make
arm-none-eabi-gcc -c -mcpu=cortex-m3 -mthumb -Wall -g -Os -ffunction-sections -fdata-sections -Iinc -I. -ICMSIS/device -ICMSIS/core -ISPL/inc -DSTM32F10X_MD -DSYSCLK_FREQ_72MHz main.c -o build/main.o
arm-none-eabi-gcc -c -mcpu=cortex-m3 -mthumb -Wall -g -Os -ffunction-sections -fdata-sections -Iinc -I. -ICMSIS/device -ICMSIS/core -ISPL/inc -DSTM32F10X_MD -DSYSCLK_FREQ_72MHz src/system_init.c -o build/system_init.o
arm-none-eabi-gcc -c -mcpu=cortex-m3 -mthumb -g asm/startup.s -o build/startup.o
arm-none-eabi-gcc -mcpu=cortex-m3 -mthumb -Wall -g -Os -ffunction-sections -fdata-sections -Iinc -I. -ICMSIS/device -ICMSIS/core -ISPL/inc -DSTM32F10X_MD -DSYSCLK_FREQ_72MHz build/system_init.o build/main.o build/startup.o -o build/firmware.elf -T stm32f10xx8.ld -nostartfiles -Wl,--gc-sections -specs=nano.specs
arm-none-eabi-objcopy -O binary build/firmware.elf build/firmware.bin
arm-none-eabi-objcopy -O ihex build/firmware.elf build/firmware.hex
arm-none-eabi-size --format=berkeley build/firmware.elf
text data bss dec hex filename
648 0 256 904 388 build/firmware.elf
Сигнал на логическом анализаторе принял такую форму:

Итого, размер прошивки составил 648 байт, и это самая-самая минимальная программа (на мой взгляд) для микроконтроллера stm32f103xx.
Как известно, в Cortex-M3 нет поддержки чисел с плавающей запятой, она реализуется программно. Будет ли это работать в данном проекте? Чтобы ответить на этот вопрос, добавим операцию с вещественными числами в "main.c"
#include "stm32f10x.h" #include "stm32f10x_gpio.h" #include "stm32f10x_rcc.h" #define WAIT 600000 void dummy_loop(volatile uint32_t count) { while (--count); } int main() { // Enable GPIOC clock RCC->APB2ENR |= RCC_APB2Periph_GPIOC; float a=0.1f; // Configure PC13 as push-pull output (max speed 2 MHz) GPIOC->CRH &= ~(GPIO_CRH_CNF13 | GPIO_CRH_MODE13); GPIOC->CRH |= GPIO_CRH_MODE13_1; // Output mode, max speed 2 MHz (0b10) // Super loop to toggle PC13 while (1) { a += 0.25; GPIOC->BSRR = GPIO_Pin_13; // Set PC13 dummy_loop(WAIT * a); GPIOC->BRR = GPIO_Pin_13; // Reset PC13 dummy_loop(WAIT); } }
После сборки проекта, размер прошивки увеличится до 1656 байт:
$ arm-none-eabi-size --format=berkeley build/firmware.elf
text data bss dec hex filename
1656 0 256 1912 778 build/firmware.elf
Прошиваем и смотрим на частоту мигания светодиода:

Здесь при нижнем уровне светодиод загорается, а при верхнем - гаснет. И как видно по записи с логического анализатора, светодиод с течением времени загорается все реже и реже, что полностью соответствует алгоритму программы.
6) Функция задержки на ассемблерных инструкциях
Теперь, когда мы добрались до желанных до 72 MHz, хочется узнать, какова же реальная производительность такого микроконтроллера. Адепты STM32 при любом случае кричат, что 72 МHz это в несколько раза быстрее чем 16, но про влияние значения waitstate на производительность CPU, я упоминаний как-то не встречал.
Самым простым тестом производительности будет функция задержки на ассемблерных инструкциях. Маркером здесь будет служить число итераций которые микроконтроллер выполняет за 1 мс. В данном случае мы не учитываем тактовую частоту каждого микроконтроллера т.к. это необъективный показатель.
Итак, для реализации функции задержки добавим в ассемблерный файл asm/assembly.s следующий код:
.global delay delay: push {r1} l1: mov.w r1,#10285 @ 72000/7 lp: subs r1,#1 bne lp subs r0,#1 bne l1 pop {r1} bx lr
Тогда main.c примет такой вид:
#include "stm32f10x.h" #include "stm32f10x_gpio.h" #include "stm32f10x_rcc.h" extern void delay(uint32_t ms); int main() { // enable GPIOC port RCC->APB2ENR |= RCC_APB2Periph_GPIOC; // --- GPIO setup ---- GPIOC->CRH &= ~(uint32_t)(0xf<<20); GPIOC->CRH |= (uint32_t)(0x2<<20); for(;;){ GPIOC->ODR ^= GPIO_Pin_13; delay(1000); } }
Как видно, цикл задержки проходит 10285 итераций за 1 мс, т.е. две инструкции выполняются вкупе за 7 тактов.
Так же функция на STM8 выполняется за 5333 итераций
.globl _delay _delay: ldw x, (03,sp) l0: ldw y, #5328 ; ->(16000/3 - 5) l1: decw y jrne l1 decw x jrne l0 ret
Т.о. на первый взгляд реальная производительность STM32 "всего" в два раза выше восьмибитного STM8.
Далее добавлено в 2025г. Для вычисления производительности процессоров составляют сложные бенчмарки, и говорить о производительности на данном примере некорректно.
Вместо того, чтобы добавлять в проект ассемблерный модуль с одной единственной функцией, можно воспользоваться inline ассемблером, и тогда "main.c" примет следующий вид:
#include "stm32f10x.h" #include "stm32f10x_gpio.h" #include "stm32f10x_rcc.h" #define MS_1000 1000 void delay_ms(uint32_t milliseconds) { __asm volatile ( "push {r0-r1}\n" // Save r0,r1 "1:\n" // Outer loop label "mov.w r1, #10285\n" // 72000/7 = 10285.714 ≈ 10285 "2:\n" // Inner loop label "subs r1, #1\n" "bne 2b\n" // Branch back to inner loop (2:) "subs %[milliseconds], #1\n" "bne 1b\n" // Branch back to outer loop (1:) "pop {r0-r1}\n" // Restore r0,r1 : /* No outputs */ : [milliseconds] "r" (milliseconds) // input : "r1", "cc" // clobber list ); } int main() { // Enable GPIOC clock RCC->APB2ENR |= RCC_APB2Periph_GPIOC; // Configure PC13 as push-pull output (max speed 2 MHz) GPIOC->CRH &= ~(GPIO_CRH_CNF13 | GPIO_CRH_MODE13); GPIOC->CRH |= GPIO_CRH_MODE13_1; // Output mode, max speed 2 MHz (0b10) // Super loop to toggle PC13 while (1) { GPIOC->BSRR = GPIO_Pin_13; // Set PC13 delay_ms(MS_1000); GPIOC->BRR = GPIO_Pin_13; // Reset PC13 delay_ms(MS_1000); } }
По логике вещей, компилятор должен сохранять все используемые регистры при вызове такой функции, и "Clobber List" это список регистров которые должны сохраняться компилятором в стеке, но если посмотреть ассемблерный код модуля "main.c", то будет видно, что там ничего подобного не происходит:
void delay_ms(uint32_t milliseconds) {
__asm volatile (
0: b403 push {r0, r1}
2: f642 012d movw r1, #10285 ; 0x282d
6: 3901 subs r1, #1
8: d1fd bne.n 6 <delay_ms+0x6>
a: 3801 subs r0, #1
c: d1f9 bne.n 2 <delay_ms+0x2>
e: bc03 pop {r0, r1}
"pop {r0-r1}\n" // Restore r0,r1
: /* No outputs */
: [milliseconds] "r" (milliseconds) // input
: "r1", "cc" // clobber list
);
}
10: 4770 bx lr
Disassembly of section .text.startup.main:
00000000 <main>:
int main() {
// Enable GPIOC clock
RCC->APB2ENR |= RCC_APB2Periph_GPIOC;
0: 4a0c ldr r2, [pc, #48] ; (34 <main+0x34>)
int main() {
2: b508 push {r3, lr}
RCC->APB2ENR |= RCC_APB2Periph_GPIOC;
4: 6993 ldr r3, [r2, #24]
6: f043 0310 orr.w r3, r3, #16
a: 6193 str r3, [r2, #24]
// Configure PC13 as push-pull output (max speed 2 MHz)
GPIOC->CRH &= ~(GPIO_CRH_CNF13 | GPIO_CRH_MODE13);
c: 4b0a ldr r3, [pc, #40] ; (38 <main+0x38>)
e: 685a ldr r2, [r3, #4]
10: f422 0270 bic.w r2, r2, #15728640 ; 0xf00000
14: 605a str r2, [r3, #4]
GPIOC->CRH |= GPIO_CRH_MODE13_1; // Output mode, max speed 2 MHz (0b10)
16: 685a ldr r2, [r3, #4]
18: f442 1200 orr.w r2, r2, #2097152 ; 0x200000
1c: 605a str r2, [r3, #4]
// Super loop to toggle PC13
while (1) {
GPIOC->BSRR = GPIO_Pin_13; // Set PC13
1e: f44f 5200 mov.w r2, #8192 ; 0x2000
delay_ms(MS_1000);
22: f44f 707a mov.w r0, #1000 ; 0x3e8
GPIOC->BSRR = GPIO_Pin_13; // Set PC13
26: 611a str r2, [r3, #16]
delay_ms(MS_1000);
28: f7ff fffe bl 0 <main> // вызов функции delay_ms
GPIOC->BRR = GPIO_Pin_13; // Reset PC13
2c: 615a str r2, [r3, #20]
delay_ms(MS_1000);
2e: f7ff fffe bl 0 <main> // вызов функции delay_ms
while (1) {
32: e7f6 b.n 22 <main+0x22>
34: 40021000 .word 0x40021000
38: 40011000 .word 0x40011000
В 22-й строке имеется инструкция " mov.w r0, #1000" которая заносит в r0 параметр функции, однако при втором вызове функции, этой операции нет. И поэтому обязанность сохранения регистров значение которых меняется во время выполнения функции, ложится на плечи программиста. Напомню, что в данном случае программы была компилирована с ключем оптимизации "-Os".
Давайте посмотрим, насколько точно функция формирует задержки.

Как можно видеть на логическом анализаторе, два вызова функции соответствуют 2000 мс, что очень точный результат.
Однако есть нюанс. Если отключить в обработчике прерывания Reset вызов функции "SystemInit", т.е. перевести микроконтроллер снова на дефолтную частоту 8 МГц, то микроконтроллер не будет работать в 9 раз медленнее. Посмотрите на лог:

Функция "delay_ms(1000)" на частоте 8 МГц, отрабатывает за 3.85 секунды, а не за 9 сек. Потому что на 8 МГц, у микроконтроллера флеш-память работает на частоте процессора, а когда микроконтроллер "разгоняют" до 72 МГц, флеш-память продолжает работать на той же самой низкой частоте, и получается, что "подтормаживает". Т.е. работа микроконтроллера на частоте 72 МГц не означает, что ваша программа будет работать в девять раз быстрее, нежели на дефолтных 8 МГц, всего лишь в четыре раза.
В микроконтроллерах других серий этот эффект постарались исправить, в частности, STM32F030 на своих 48 МГц работает на уровне STM32F103 c частотой 72 МГц. Если STM32F103 за 1мс выполняет 10285 итераций пустого цикла, то STM32F030 на 48МГц совершает 10000 итераций за одну миллисекунду. А микроконтроллер компании Artery AT32F403 выполняет 40000 итераций за 1 миллисекунду на рабочей частоте 200МГц. Техника идет вперед.
7) Функция задержки на таймере SysTick
Наиболее универсальным способом осуществления задержек, является использование таймера SysTick. Это простой 32-битный счетчик с одним прерыванием, который является частью ядра Cortex-M. Наиболее доходчиво про его конфигурацию можно почитать в статье - " ARM. Учебный Курс. SysTick — Системный таймер | Электроника для всех", либо в фирменной документации - "Cortex-M3 Technical Reference Manual", глава 8.2.2.
Чтобы добавить работу с таймером SysTick в проект, я предлагаю добавить в корневой каталог проекта три файла. Два заголовочных "inc/main.h", "inc/utils.h" и один с исходным кодом: "src/utils.c". В файлы сборки проекта ничего добавлять не надо, всё подхватится автоматически.
В "main.h" пока скинем скинем именованные константы:
#ifndef __MAIN_H #define __MAIN_H #define MS_1000 1000 #define MS_100 100 #endif // __MAIN_H
В "utils.h" будет декларация функций модуля "utils.c":
#ifndef __UTILS_H #define __UTILS_H #include "stm32f10x.h" void systick_init(void); void delay_ms_asm(uint32_t milliseconds); void delay_ms(uint32_t ms); #endif // __UTILS_H
В "utils.c" перенесем функцию задержки из "main.c" и добавим код для работы с таймером SysTick:
#include "utils.h" volatile uint32_t systick_counter = 0; void SysTick_Handler(void) { systick_counter++; } void systick_init(void) { systick_counter=0; // Configure SysTick for 1ms interrupts if (SysTick_Config(SystemCoreClock / 1000)) { // Error handling while (1); } } uint32_t get_ticks(void) { return systick_counter; } void delay_ms(uint32_t ms) { uint32_t start = get_ticks(); while ((get_ticks() - start) < ms) { __WFI(); // Wait for interrupt (power saving) } } void delay_ms_asm(uint32_t milliseconds) { __asm volatile ( "push {r0-r1}\n" // Save r0,r1 "1:\n" // Outer loop label "mov.w r1, #10285\n" // 72000/7 = 10285.714 ≈ 10285 "2:\n" // Inner loop label "subs r1, #1\n" "bne 2b\n" // Branch back to inner loop (2:) "subs %[milliseconds], #1\n" "bne 1b\n" // Branch back to outer loop (1:) "pop {r0-r1}\n" // Restore r0,r1 : /* No outputs */ : [milliseconds] "r" (milliseconds) // input : "r1", "cc" // clobber list ); }
Здесь "SysTick_Handler" - обработчик прерывания таймера, содержит инкрементный счетчик. "get_ticks()" возвращает значение счетчика, "systick_init()" настраивает таймер на частоту 1 кГц и запускает его, а "delay_ms()" - реализация задержки.
Работа таймер SysTick требует включения работы прерываний. Поэтому модуль "main.c" примет следующий вид:
#include "stm32f10x.h" #include "stm32f10x_gpio.h" #include "stm32f10x_rcc.h" #include "main.h" #include "utils.h" uint32_t SystemCoreClock = 72000000; // Clock STM32F103 at reset int main() { // Enable GPIOC clock RCC->APB2ENR |= RCC_APB2Periph_GPIOC; // Configure PC13 as push-pull output (max speed 2 MHz) GPIOC->CRH &= ~(GPIO_CRH_CNF13 | GPIO_CRH_MODE13); GPIOC->CRH |= GPIO_CRH_MODE13_1; // Output mode, max speed 2 MHz (0b10) // setup SysTick systick_init(); // Let's go.. __enable_irq(); // Super loop to toggle PC13 while (1) { GPIOC->BSRR = GPIO_Pin_13; // Set PC13 delay_ms(MS_1000); GPIOC->BRR = GPIO_Pin_13; // Reset PC13 delay_ms(MS_1000); } }
В отладочном модуле Cortex-M имеется 32-битный таймер который работает на частоте процессора. С его помощью можно реализовать задержку измеряемую в микросекундах. Он описан в TRM "Cortex-M3 Technical Reference Manual", глава 11.5.
В файл "utils.c" добавим две функции:
bool isDWT_Init=false; void DWT_Init(void) { if ((CoreDebug->DEMCR & CoreDebug_DEMCR_TRCENA_Msk) == 0) { CoreDebug->DEMCR |= CoreDebug_DEMCR_TRCENA_Msk; DWT_CYCCNT = 0; DWT_CTRL |= 1U; // Enable CYCCNT directly (bit 0) } isDWT_Init=true; } void delay_us(uint32_t us) { if (!isDWT_Init) { DWT_Init(); } uint32_t cycles = us * (SystemCoreClock/1000000); if (cycles < 12) cycles = 12; // Minimum measurable delay DWT_CYCCNT = 0; while (DWT_CYCCNT < cycles); }
Для проверки я выставил в суперцикле задержки на 1000 мкс и вот какой результат показал логический анализатор:

Т.е. работает довольно точно.
8) Настройка и передача данных по UART
Далее для вывода отладочной информации нам понадобится UART интерфейс. Работа с UART модулем в STM32 мало чем отличается от своего аналога в STM8, разве что только тем, здесь их три. При этом только USART1 тактируется от скоростной APB2 шины, остальные два тактируются от APB1.

Настройка UART через регистры подробнейшем образом разобрана в статье: ARM Учебный курс. USART | Электроника для всех. От STM8 процедура настройки отличается необходимостью включать альтернативный режим работы GPIO и немного другой формулой расчета регистра установки битрейта USART1->BRR.
Для реализации функций UART потребуется добавить модуль "uart" в проект (файлы автоматически подхватятся сборочными скриптами).
Настройку USART1 интерфейса STM32F103 я разместил в модуле "main.c":
#include "stm32f10x.h" #include "stm32f10x_gpio.h" #include "stm32f10x_rcc.h" #include "stm32f10x_usart.h" #include "main.h" #include "utils.h" #include "uart.h" uint32_t SystemCoreClock = 72000000; // Clock STM32F103 at reset int main() { // --- RCC configuration ------- RCC->APB2ENR |= RCC_APB2Periph_GPIOC; // Enable GPIOC clock RCC->APB2ENR |= RCC_APB2ENR_IOPAEN | RCC_APB2ENR_USART1EN; // Enable GPIOA and USART1 clocks // --- GPIO configuration ---- // Configure PC13 as push-pull output (max speed 2 MHz) GPIOC->CRH &= ~(GPIO_CRH_CNF13 | GPIO_CRH_MODE13); GPIOC->CRH |= GPIO_CRH_MODE13_1; // Output mode, max speed 2 MHz (0b10) // Configure PA9 as alternate function push-pull (TX) GPIOA->CRH &= ~(GPIO_CRH_CNF9 | GPIO_CRH_MODE9); // Clear bits GPIOA->CRH |= (GPIO_CRH_CNF9_1 | GPIO_CRH_MODE9); // Alternate function output, max speed 50MHz // Configure PA10 as input floating (RX) GPIOA->CRH &= ~(GPIO_CRH_CNF10 | GPIO_CRH_MODE10); // Clear bits GPIOA->CRH |= GPIO_CRH_CNF10_0; // Floating input // --- UART configuration --- //USART1->BRR = 0x1d4c; // 9600 baud @ 72 MHz (APB2) USART1->BRR = 0x271; // 115200 baud @ 72MHz (APB2) USART1->CR1 = USART_CR1_TE | USART_CR1_RE | USART_CR1_UE; // Enable TX, RX and USART // Enable RX interrupt (Optional) // USART1->CR1 |= USART_CR1_RXNEIE; // NVIC_EnableIRQ(USART1_IRQn); // ---- SysTick Configuration ---- systick_init(); // Let's go.. __enable_irq(); // Super loop to toggle PC13 while (1) { // Toggle PC13 GPIOC->ODR ^= GPIO_Pin_13; // Send data via UART USART1->DR = 'A'; // Send character while (!(USART1->SR & USART_SR_TXE)); // Wait for transmission complete delay_ms(1000); } }
В суперцикле небольшой отладочный код, для проверки работы интерфейса.
Нам понадобится заголовочный файл из SPL stm32f10x_usart.h в котором содержатся некоторые битовые маски регистров. К сожалению не все битовые маски содержались в заголовочном файле. Часть находилась в stm32f10x_usart.c. Их пришлось перенести в свой заголовочный файл uart.h:
показать#ifndef __UART_H__ #define __UART_H__ #include "stm32f10x.h" #include "stm32f10x_usart.h" #define USART_CR1_UE_Set ((uint16_t)0x2000) /*!< USART Enable Mask */ #define USART_CR1_UE_Reset ((uint16_t)0xDFFF) /*!< USART Disable Mask */ #define USART_CR1_WAKE_Mask ((uint16_t)0xF7FF) /*!< USART WakeUp Method Mask */ #define USART_CR1_RWU_Set ((uint16_t)0x0002) /*!< USART mute mode Enable Mask */ #define USART_CR1_RWU_Reset ((uint16_t)0xFFFD) /*!< USART mute mode Enable Mask */ #define USART_CR1_SBK_Set ((uint16_t)0x0001) /*!< USART Break Character send Mask */ #define USART_CR1_CLEAR_Mask ((uint16_t)0xE9F3) /*!< USART CR1 Mask */ #define USART_CR2_Address_Mask ((uint16_t)0xFFF0) /*!< USART address Mask */ #define USART_CR2_LINEN_Set ((uint16_t)0x4000) /*!< USART LIN Enable Mask */ #define USART_CR2_LINEN_Reset ((uint16_t)0xBFFF) /*!< USART LIN Disable Mask */ #define USART_CR2_LBDL_Mask ((uint16_t)0xFFDF) /*!< USART LIN Break detection Mask */ #define USART_CR2_STOP_CLEAR_Mask ((uint16_t)0xCFFF) /*!< USART CR2 STOP Bits Mask */ #define USART_CR2_CLOCK_CLEAR_Mask ((uint16_t)0xF0FF) /*!< USART CR2 Clock Mask */ #define USART_CR3_SCEN_Set ((uint16_t)0x0020) /*!< USART SC Enable Mask */ #define USART_CR3_SCEN_Reset ((uint16_t)0xFFDF) /*!< USART SC Disable Mask */ #define USART_CR3_NACK_Set ((uint16_t)0x0010) /*!< USART SC NACK Enable Mask */ #define USART_CR3_NACK_Reset ((uint16_t)0xFFEF) /*!< USART SC NACK Disable Mask */ #define USART_CR3_HDSEL_Set ((uint16_t)0x0008) /*!< USART Half-Duplex Enable Mask */ #define USART_CR3_HDSEL_Reset ((uint16_t)0xFFF7) /*!< USART Half-Duplex Disable Mask */ #define USART_CR3_IRLP_Mask ((uint16_t)0xFFFB) /*!< USART IrDA LowPower mode Mask */ #define USART_CR3_CLEAR_Mask ((uint16_t)0xFCFF) /*!< USART CR3 Mask */ #define USART_CR3_IREN_Set ((uint16_t)0x0002) /*!< USART IrDA Enable Mask */ #define USART_CR3_IREN_Reset ((uint16_t)0xFFFD) /*!< USART IrDA Disable Mask */ #define USART_GTPR_LSB_Mask ((uint16_t)0x00FF) /*!< Guard Time Register LSB Mask */ #define USART_GTPR_MSB_Mask ((uint16_t)0xFF00) /*!< Guard Time Register MSB Mask */ #define USART_IT_Mask ((uint16_t)0x001F) /*!< USART Interrupt Mask */ /* USART OverSampling-8 Mask */ #define CR1_OVER8_Set ((u16)0x8000) /* USART OVER8 mode Enable Mask */ #define CR1_OVER8_Reset ((u16)0x7FFF) /* USART OVER8 mode Disable Mask */ /* USART One Bit Sampling Mask */ #define CR3_ONEBITE_Set ((u16)0x0800) /* USART ONEBITE mode Enable Mask */ #define CR3_ONEBITE_Reset ((u16)0xF7FF) /* USART ONEBITE mode Disable Mask */ #endif
Подключение USB-UART адаптера к Bluepill следующее:RX(адаптера) к PA9(bluebill), GND(адаптера) к GND(bluepill):

После компиляции и прошивки, на ножке PA9 появится UART сигнал с литерой "эй" (hex-код 0x41):

Для того, чтобы иметь возможность передавать через USART интерфейс строки и числа (предварительно прошедшию сериализацию), в модуле "uart.c" разместим следующий код:
#include "uart.h" #include <stdarg.h> // For variable arguments support // Send single character void usart1_send_char(uint8_t ch) { USART1->DR = ch; while(!(USART1->SR & USART_SR_TXE)); // Wait until transmit complete } // Send string (null-terminated) void usart1_print_string(const char *str) { while(*str) { usart1_send_char(*str++); } } // Send number (32-bit unsigned) void usart1_print_number(uint32_t num) { char buffer[10]; // Maximum 10 digits for 32-bit number char *p = buffer + sizeof(buffer) - 1; *p = '\0'; // Null terminator do { *(--p) = '0' + (num % 10); num /= 10; } while(num > 0); usart1_print_string(p); } // Extended version with format support (basic implementation) void usart1_printf(const char *format, ...) { va_list args; va_start(args, format); while(*format) { if(*format == '%') { format++; switch(*format) { case 'd': { int32_t num = va_arg(args, int32_t); if(num < 0) { usart1_send_char('-'); num = -num; } usart1_print_number((uint32_t)num); break; } case 'u': usart1_print_number(va_arg(args, uint32_t)); break; case 's': usart1_print_string(va_arg(args, char*)); break; case 'c': usart1_send_char(va_arg(args, int)); break; case '%': usart1_send_char('%'); break; } } else { usart1_send_char(*format); } format++; } va_end(args); }
Для проверки кода, суперцикл в "main.c" пусть будет таким:
// Super loop to toggle PC13 int i=0; while (1) { // Toggle PC13 GPIOC->ODR ^= GPIO_Pin_13; // Send string usart1_print_string("Hello World\r\n"); // Send number usart1_print_number(314159); // Formatted output usart1_printf("Temperature: %d°C, Status: %s\r\n", i++, "OK"); delay_ms(1000); }
После компиляции, размер прошивки перевалит за первый килобайт:
arm-none-eabi-size --format=berkeley build/firmware.elf text data bss dec hex filename 1116 4 260 1380 564 build/firmware.elf
К счастью, в микроконтроллере имеется еще 63 кБ флеш-памяти.
На логическом анализаторе, передача по UART будет выглядеть так:

В терминальной программе пойдет лог:

Можно немного доработать модуль "uart.c" добавив функцию печати шестнадцатеричного числа:
const char hex[] = "0123456789ABCDEF"; void usart1_print_hex(uint32_t num) { char buffer[11]; // Enough for "0x" + 8 hex digits + null terminator char *p = buffer + sizeof(buffer) - 1; *p = '\0'; // Null terminator // Convert number to hex (backwards) do { *(--p) = hex[num & 0xF]; // Get lowest nibble num >>= 4; // Shift right by 4 bits } while (num != 0); // Add "0x" prefix *(--p) = 'x'; *(--p) = '0'; // Send via UART usart1_print_string(p); }
Теперь, в функции "usart1_printf", в switch-блок добавляем два кейса:
case 'x': usart1_print_hex(va_arg(args, uint32_t)); break; case 'X': { int32_t num = va_arg(args, int32_t); if(num < 0) { usart1_send_char('-'); num = -num; } usart1_print_hex((uint32_t)num); break; }
Для примера, с помощью данной функции можно вывести Unique ID микроконтроллера. Он прошит по адресу: 0x1FFF_F7E8

страница из Reference Manual RM0008
В модуле "main.c" добавим адрес:
volatile uint32_t *uid = (volatile uint32_t*)0x1FFFF7E8;
А в главный цикл печать Unique ID:
usart1_printf("STM32-%x-%x-%x",uid[0],uid[1],uid[2]);
Теперь в терминальной программе пойдет следующий лог:
314159 Temperature: 19°C, Status: OK STM32-0x670FF52-0x53536752-0x87163913 Hello World 314159 Temperature: 20°C, Status: OK STM32-0x670FF52-0x53536752-0x87163913
9) Прием строки через UART интерфейс
Прием данных по UART осуществляется с помощью 37-го прерывания "USART1 Global Interrupt", вектор 0xD4. В отличии от прерывания таймера SysTick, его надо включать через контроллер прерываний. Для этого, в модуле "main.c" следует раскомментировать строки:
USART1->CR1 |= USART_CR1_RXNEIE;
NVIC_EnableIRQ(USART1_IRQn);
При необходимости можно выставить свой приоритет прерывания командой:
NVIC_SetPriority(USART1_IRQn,1); // set priority for USART1 IRQ
Данная команда должна быть перед " NVIC_EnableIRQ(USART1_IRQn)". Приоритеты могут быть от 0 до 15. Чем меньше номер приоритета, тем он "сильнее/главнее".
В модуле "uart.c" разместим обработчик прерывания:
#define UART_BUFFER_LEN 10 volatile bool UART_RDY = false; // Flag set when a full line is received volatile uint8_t UART_IDX = 0; // Current position in the buffer volatile char UART_BUF[UART_BUFFER_LEN]; // Circular buffer for UART data void USART1_IRQHandler(void) { uint32_t status = USART1->SR; uint8_t ch=USART1->DR; if ((status & USART_SR_ORE) || UART_RDY) { return; } if (status & USART_SR_RXNE ) { if (ch == '\n' || ch == '\r') { // Standard line endings UART_BUF[UART_IDX] = '\0'; // Null-terminate UART_RDY = true; // Signal main loop } else if (UART_IDX < (UART_BUFFER_LEN-1)) { UART_BUF[UART_IDX++] = ch; // Store character } else { // Buffer full - terminate early UART_BUF[UART_BUFFER_LEN-1] = '\0'; UART_RDY = true; // Buffer full } } }
Данное прерывание принимает строку, которая должна заканчиваться символами '\n' или '\r'. Строка размещается в кольцевом буфере "UART_BUF". После получении строки выставляется флаг "UART_RDY".
Прерывание по RXNEIE могут вызывать два флага в статусном регистре SR - RXNE и ORE:

Флаг RXNE выставляется, когда приемник UART принимает байт с линии передачи. Флаг снимается, при чтении регистра USARTx_DR.
Флаг ORE выставляется, когда приемник UART принимает байт с линии передачи, но регистр USART_DR не пуст, т.е. флаг RXNE выставлен, а регистр USART_DR все еще не считан. Флаг ORE очищается последовательным чтением регистров USART_SR и USART_DR.
Итак, разбираем код обработчика прерывания USART1:
void USART1_IRQHandler(void) { uint32_t status = USART1->SR; uint8_t ch=USART1->DR;
Считываем регистры SR и DR, тем самым сбрасывая флаги ORE и RXNE если они были установлены. Далее:
if ((status & USART_SR_ORE) || UART_RDY) { return; }
Если был выставлен флаг ORE, или строка уже принята, но еще не обработана, то выходим из прерывания. Последнее может произойти, когда в конце строки идут несколько символов окончания строки. Такие символы отбрасываются.
if (status & USART_SR_RXNE ) {
В этих скобках идет обработка принимаемых данных.
if (ch == '\n' || ch == '\r') { // Standard line endings UART_BUF[UART_IDX] = '\0'; // Null-terminate UART_RDY = true; // Signal main loop }
Если принимается конец строки, то буфер терминируется записью нуля и выставляется флаг UART_DRY о готовности строки к обработке.
else if (UART_IDX < (UART_BUFFER_LEN-1)) { UART_BUF[UART_IDX++] = ch; // Store character }
Здесь происходит запись принятых данных в буфер.
else { // Buffer full - terminate early UART_BUF[UART_BUFFER_LEN-1] = '\0'; UART_RDY = true; // Buffer full }
Если буфер подошёл к концу, т.е. слишком длинная строка, то терминируем буфер и выставляем флаг UART_RDY.
Должен заметить, что если при отладке поставить break point на прерывания и посмотреть регистр UART1_SR, то RXNE флаг там будет сброшен:

Возможно потому, что отладчик читает регистр DR, и это приводит к сбросу флага. Хотя флаг ORE почему-то не сбрасывается. Такая вот странность.
Также в модуле "uart.c" разместим функцию для обработки принятых данных.
bool uart_command_processing(bool flag) { bool ret=flag; char local_buf[UART_BUFFER_LEN]; __disable_irq(); // Enter critical section for (uint32_t i = 0; i < UART_BUFFER_LEN; i++) { local_buf[i] = UART_BUF[i]; UART_BUF[i]=0; } UART_IDX=0; UART_RDY = false; __enable_irq(); // Exit critical section // Trim whitespace and make case-insensitive char* cmd = local_buf; while(*cmd == ' ') cmd++; // Skip leading spaces if (embedded_strncmp(cmd, "help",UART_BUFFER_LEN) == 0 || \ embedded_strncmp(cmd, "?",UART_BUFFER_LEN) == 0) { usart1_print_string("Help menu:\r\n"); usart1_print_string("t- Disable print tick\r\n"); usart1_print_string("t+ Enable print tick\r\n"); } else if (embedded_strncmp(cmd, "t-",UART_BUFFER_LEN) == 0) { usart1_print_string("Tick disabled\r\n"); ret = false; } else if (embedded_strncmp(cmd, "t+",UART_BUFFER_LEN) == 0) { usart1_print_string("Tick enabled\r\n"); ret =true; } else { usart1_print_string("Unknown command: "); usart1_print_string(cmd); usart1_print_string("\r\n"); } return ret; }
функция управляет только одним флагом, поэтому возвращает булевое значение. В самом начале функции, буфер UART_BUF копируется в локальный буфер, одновременно очищая его. После чего сбрасывается флаг UART_RDY. Дальше происходит парсинг принятой строки. Доступные команды: "t+", "t-", "help", "?".
Для сравнения строк используется функция:
// strncmp version int embedded_strncmp(volatile const char *s1, const char *s2, uint8_t max_len) { for (uint8_t i = 0; i < max_len; i++) { char c1 = s1[i]; char c2 = s2[i]; if (c1 == '\0' || c2 == '\0' || c1 != c2) { return (int)(c1 - c2); } } return 0; }
Которая также размещается в модуле "uart.c".
Т.к. в суперцикле используется блокирующая функция delay_ms(), для обработки входящих данных потребуется заменить ее неблокирующей версией, которая при выходе из спящего режима будет проверять флаг UART_RDY, и если он окажется остановлен, она должная передать управление обработчику принятых данных "uart_command_processing()". Я назвал ее "smart-delay()":
extern bool UART_RDY; int smart_delay(uint32_t ms) { uint32_t start = get_ticks(); while (((get_ticks() - start) < ms) && \ (UART_RDY == false)) { __WFI(); // Wait for interrupt (power saving) } uint32_t ticks=get_ticks(); int ret = ms - (ticks -start); return ret; }
Если после выхода из спящего режима установлен флаг UART_DRY, то функция прерывает работу и возвращает количество миллисекунд, которые не успела отработать. Эта функция размещена в модуле "utils.c", вместе с остальными функциями задержки.
Суперцикл с приемом команд по UART получился таким:
bool tick=true; uint32_t cnt=0; // Super loop usart1_print_string("ready...\r\n"); uint32_t interval=WAIT; // milliseconds while (1) { int remainder=smart_delay(interval); if (UART_RDY) { tick=uart_command_processing(tick); } if ( remainder > 0 ) { interval = remainder; continue; } else { interval =WAIT; } ++cnt; GPIOC->ODR ^= GPIO_Pin_13; // Toggle PC13 if (tick) { usart1_printf("tick - %u\r\n",cnt); } } }
Суперцикл раз в секунду мигает светодиодом и отправляет по UART строку "tick" с количеством итераций. "smart_delay()" если обнаруживает новые данные, прекращает работу и в дело вступает "uart_command_processing()". После завершения обработки принятых данных, управление вновь возвращается "smart_delay()", чтобы она "дотикала" временной интервал до конца.
Доступны команды "t+" и "t-", которые включают и выключают передачу "тика".
Давайте посмотрим, как быстро происходит обработка принимаемых данных:

Выглядит практически мгновенно, программа мне показала интервал в 20 мс между окончанием приема и началом передачи. Примерно туже цифру можно увидеть мониторе последовательного порта:

Осталось добавить про подключение. Для UART1 используются пины PA9 (TX) и PA10(RX). USB-UART конвертор подключается кроссированно: RX пин конвертора к TX пину микроконтроллера, TX пин конвертора к RX пину микроконтроллера.
10) Числа с плавающей запятой, подключение стандартной библиотеки Си к проекту
Имеется целый класс задач, которые требуют операций с вещественными числами. Это вынуждает использовать стандартную библиотеку Си, где имеется модуль "math", в котором реализованы различные математические функции. Иногда просто требуется какая-то функция из стандартной библиотеки, скажем получение псевдослучайного числа, а изобретать велосипед нет времени.
-
Итак, для подключения стандартной библиотеки Си к проекту необходимо:
-
Убедиться в том, что в скрипте компоновщика раскомментирована следующая секция:
/DISCARD/ : { libc.a ( * ) libm.a ( * ) libgcc.a ( * ) } -
В обработчике прерывания "Reset" (файл startup.s) следует раскомментировать строку:
bl __libc_init_array
-
В Makefile, в опциях компоновщика, заменить опцию "-nostartfiles" на "-specs=nosys.specs":
LDFLAGS = -T stm32f10xx8.ld -Wl,--gc-sections -specs=nosys.specs -specs=nano.specs
Пересобираем проект:
$ make clean && make all
rm -f -r build
arm-none-eabi-gcc -c -mcpu=cortex-m3 -mthumb -Wall -g -Os -ffunction-sections -fdata-sections -Iinc -I. -ICMSIS/device -ICMSIS/core -ISPL/inc -DSTM32F10X_MD -DSYSCLK_FREQ_72MHz src/system_init.c -o build/system_init.o
arm-none-eabi-gcc -c -mcpu=cortex-m3 -mthumb -Wall -g -Os -ffunction-sections -fdata-sections -Iinc -I. -ICMSIS/device -ICMSIS/core -ISPL/inc -DSTM32F10X_MD -DSYSCLK_FREQ_72MHz src/uart.c -o build/uart.o
arm-none-eabi-gcc -c -mcpu=cortex-m3 -mthumb -Wall -g -Os -ffunction-sections -fdata-sections -Iinc -I. -ICMSIS/device -ICMSIS/core -ISPL/inc -DSTM32F10X_MD -DSYSCLK_FREQ_72MHz src/utils.c -o build/utils.o
arm-none-eabi-gcc -c -mcpu=cortex-m3 -mthumb -Wall -g -Os -ffunction-sections -fdata-sections -Iinc -I. -ICMSIS/device -ICMSIS/core -ISPL/inc -DSTM32F10X_MD -DSYSCLK_FREQ_72MHz main.c -o build/main.o
arm-none-eabi-gcc -c -mcpu=cortex-m3 -mthumb -g asm/startup.s -o build/startup.o
arm-none-eabi-gcc -mcpu=cortex-m3 -mthumb -Wall -g -Os -ffunction-sections -fdata-sections -Iinc -I. -ICMSIS/device -ICMSIS/core -ISPL/inc -DSTM32F10X_MD -DSYSCLK_FREQ_72MHz build/system_init.o build/uart.o build/utils.o build/main.o build/startup.o -o build/firmware.elf -T stm32f10xx8.ld -Wl,--gc-sections -specs=nosys.specs -specs=nano.specs
arm-none-eabi-objcopy -O binary build/firmware.elf build/firmware.bin
arm-none-eabi-objcopy -O ihex build/firmware.elf build/firmware.hex
arm-none-eabi-size --format=berkeley build/firmware.elf
text data bss dec hex filename
1908 12 300 2220 8ac build/firmware.elf
Прошивка увеличилась почти на сотню с небольшим байт. Обращаю внимание, что опция: "-specs=nano.specs" указывает на использование реализации стандартной библиотеки "newlib", которая идет вместе с компилятором, что был скачан с сайта arm. Если вы тулчейн ставили с репозитория вашего дистрибутива, то этой библиотеки там может и не быть, возможно ее надо будет установить отдельно.
Теперь прошиваем микроконтроллер командой:
$ make flash
И если зеленый светодиод продолжит мигать, то значит, что все было успешно.
В "CMakeLists.txt" также потребуется заменить в строке:
set(CMAKE_EXE_LINKER_FLAGS "-nostartfiles -specs=nano.specs -T${LINKER_SCRIPT} -Wl,--gc-sections")
опцию "-nostartfiles" на "-specs=nosys.specs". После чего собираем:
$ mkdir cbuild && cd $_ $ cmake .. -- The C compiler identification is GNU 11.2.0 -- The ASM compiler identification is GNU -- Found assembler: /usr/bin/cc -- Detecting C compiler ABI info -- Detecting C compiler ABI info - done -- Check for working C compiler: /usr/bin/cc - skipped -- Detecting C compile features -- Detecting C compile features - done -- Configuring done -- Generating done -- Build files have been written to: /home/flanker/qtcreator_projects/00_blink_148/cbuild $ make all && make size Scanning dependencies of target firmware.elf [ 16%] Building C object CMakeFiles/firmware.elf.dir/src/uart.c.o [ 33%] Building C object CMakeFiles/firmware.elf.dir/main.c.o [ 50%] Building C object CMakeFiles/firmware.elf.dir/src/system_init.c.o [ 66%] Building C object CMakeFiles/firmware.elf.dir/src/utils.c.o [ 83%] Building ASM object CMakeFiles/firmware.elf.dir/asm/startup.s.o [100%] Linking C executable firmware.elf Generating firmware.bin and firmware.hex [100%] Built target firmware.elf Consolidate compiler generated dependencies of target firmware.elf [100%] Built target firmware.elf text data bss dec hex filename 1908 12 300 2220 8ac firmware.elf [100%] Built target size
Размер прошивки как можно видеть совпал. Обязательно прошиваем и проверяем.
Самые обширные изменения потребовал скрипт Qbs. Там пришлось добавить секцию "cpp.DriverLinkerFlags" и перетасовать остальные секции. Посто приведу готовый скрипт под спойлером:
открыть спойлерimport qbs
Product {
type: ["application","flash"]
Depends { name: "cpp" }
name: "firmware"
property string Home: sourceDirectory
property string Inc: Home + "/inc"
property string Src: Home + "/src"
property string Asm: Home + "/asm"
cpp.positionIndependentCode: false
cpp.executableSuffix: ".elf"
cpp.includePaths:[
"CMSIS/device",
"CMSIS/core",
"SPL/inc",
"inc",
]
cpp.driverFlags: [
"-mcpu=cortex-m3",
"-mthumb",
"-Wall",
"-ffunction-sections",
"-fdata-sections",
]
cpp.driverLinkerFlags: [
"-Wl,--gc-sections",
"-specs=nosys.specs",
"-specs=nano.specs",
"-T" + sourceDirectory + "/stm32f10xx8.ld",
]
cpp.cFlags: [
"-mthumb",
"-mcpu=cortex-m3",
"-Wall",
]
cpp.defines: [
"STM32F10X_MD",
"SYSCLK_FREQ_72MHz",
]
Properties
{
condition: qbs.buildVariant === "debug"
cpp.defines: outer.concat(["DEBUG=1"])
cpp.debugInformation: true
cpp.optimization: "debug"
cpp.cFlags: outer.concat(["-ggdb"])
}
Properties
{
condition: qbs.buildVariant === "release"
cpp.debugInformation: false
cpp.optimization: "small"
}
Group {
name: "Headers"
files: [
Inc + "/*.h",
]
fileTags: ["h_src"]
}
Group {
name: "Assembly"
fileTags: ["asm"]
files: [
Asm + "/*.s",
]
}
Group {
name: "Src"
files: [
Src + "/*.c",
]
}
files: [
"main.c",
]
Rule
{
inputs: ["application"]
Artifact
{
filePath: product.name + ".bin"
fileTags: "flash"
}
prepare:
{
var size_name=input.filePath
var argsObjcopy = ["-O", "binary", input.filePath, output.filePath]
var cmd_bin=new Command("arm-none-eabi-objcopy",argsObjcopy)
var cmd_size=new Command("arm-none-eabi-size",size_name)
cmd_bin.description = "Generating binary: " + output.fileName
cmd_size.description = "Size of " + output.fileName
return [cmd_bin,cmd_size]
}
}
}
Сборка проекта с помощью Qbs:
$ qbs build config:release profile:arm-none-eabi-gcc-10_3 --command-echo-mode command-line Build graph does not yet exist for configuration 'release'. Starting from scratch. Resolving project for configuration release WARNING: Could not detect target platform ('linux' given) Setting up build graph for configuration release Building for configuration release /usr/local/bin/arm-none-eabi-as -I/home/flanker/qtcreator_projects/00_blink_148/CMSIS/device -I/home/flanker/qtcreator_projects/00_blink_148/CMSIS/core -I/home/flanker/qtcreator_projects/00_blink_148/SPL/inc -I/home/flanker/qtcreator_projects/00_blink_148/inc -o /home/flanker/qtcreator_projects/00_blink_148/release/firmware.9bcf18e4/2445be8241aabd34/startup.s.o /home/flanker/qtcreator_projects/00_blink_148/asm/startup.s /usr/local/bin/arm-none-eabi-gcc -Os -Wall -Wextra -mcpu=cortex-m3 -mthumb -Wall -ffunction-sections -fdata-sections -pipe -fvisibility=default -mthumb -mcpu=cortex-m3 -Wall -DNDEBUG -DSTM32F10X_MD -DSYSCLK_FREQ_72MHz -I/home/flanker/qtcreator_projects/00_blink_148/CMSIS/device -I/home/flanker/qtcreator_projects/00_blink_148/CMSIS/core -I/home/flanker/qtcreator_projects/00_blink_148/SPL/inc -I/home/flanker/qtcreator_projects/00_blink_148/inc -o /home/flanker/qtcreator_projects/00_blink_148/release/firmware.9bcf18e4/f27fede2220bcd32/system_init.c.o -c /home/flanker/qtcreator_projects/00_blink_148/src/system_init.c /usr/local/bin/arm-none-eabi-gcc -Os -Wall -Wextra -mcpu=cortex-m3 -mthumb -Wall -ffunction-sections -fdata-sections -pipe -fvisibility=default -mthumb -mcpu=cortex-m3 -Wall -DNDEBUG -DSTM32F10X_MD -DSYSCLK_FREQ_72MHz -I/home/flanker/qtcreator_projects/00_blink_148/CMSIS/device -I/home/flanker/qtcreator_projects/00_blink_148/CMSIS/core -I/home/flanker/qtcreator_projects/00_blink_148/SPL/inc -I/home/flanker/qtcreator_projects/00_blink_148/inc -o /home/flanker/qtcreator_projects/00_blink_148/release/firmware.9bcf18e4/f27fede2220bcd32/uart.c.o -c /home/flanker/qtcreator_projects/00_blink_148/src/uart.c /usr/local/bin/arm-none-eabi-gcc -Os -Wall -Wextra -mcpu=cortex-m3 -mthumb -Wall -ffunction-sections -fdata-sections -pipe -fvisibility=default -mthumb -mcpu=cortex-m3 -Wall -DNDEBUG -DSTM32F10X_MD -DSYSCLK_FREQ_72MHz -I/home/flanker/qtcreator_projects/00_blink_148/CMSIS/device -I/home/flanker/qtcreator_projects/00_blink_148/CMSIS/core -I/home/flanker/qtcreator_projects/00_blink_148/SPL/inc -I/home/flanker/qtcreator_projects/00_blink_148/inc -o /home/flanker/qtcreator_projects/00_blink_148/release/firmware.9bcf18e4/3a52ce780950d4d9/main.c.o -c /home/flanker/qtcreator_projects/00_blink_148/main.c /usr/local/bin/arm-none-eabi-gcc -Os -Wall -Wextra -mcpu=cortex-m3 -mthumb -Wall -ffunction-sections -fdata-sections -pipe -fvisibility=default -mthumb -mcpu=cortex-m3 -Wall -DNDEBUG -DSTM32F10X_MD -DSYSCLK_FREQ_72MHz -I/home/flanker/qtcreator_projects/00_blink_148/CMSIS/device -I/home/flanker/qtcreator_projects/00_blink_148/CMSIS/core -I/home/flanker/qtcreator_projects/00_blink_148/SPL/inc -I/home/flanker/qtcreator_projects/00_blink_148/inc -o /home/flanker/qtcreator_projects/00_blink_148/release/firmware.9bcf18e4/f27fede2220bcd32/utils.c.o -c /home/flanker/qtcreator_projects/00_blink_148/src/utils.c /usr/local/bin/arm-none-eabi-gcc -mcpu=cortex-m3 -mthumb -Wall -ffunction-sections -fdata-sections -o /home/flanker/qtcreator_projects/00_blink_148/release/firmware.9bcf18e4/firmware.elf /home/flanker/qtcreator_projects/00_blink_148/release/firmware.9bcf18e4/2445be8241aabd34/startup.s.o /home/flanker/qtcreator_projects/00_blink_148/release/firmware.9bcf18e4/3a52ce780950d4d9/main.c.o /home/flanker/qtcreator_projects/00_blink_148/release/firmware.9bcf18e4/f27fede2220bcd32/system_init.c.o /home/flanker/qtcreator_projects/00_blink_148/release/firmware.9bcf18e4/f27fede2220bcd32/uart.c.o /home/flanker/qtcreator_projects/00_blink_148/release/firmware.9bcf18e4/f27fede2220bcd32/utils.c.o -Wl,--gc-sections -specs=nosys.specs -specs=nano.specs -T/home/flanker/qtcreator_projects/00_blink_148/stm32f10xx8.ld /usr/local/bin/arm-none-eabi-objcopy -O binary /home/flanker/qtcreator_projects/00_blink_148/release/firmware.9bcf18e4/firmware.elf /home/flanker/qtcreator_projects/00_blink_148/release/firmware.9bcf18e4/firmware.bin /usr/local/bin/arm-none-eabi-size /home/flanker/qtcreator_projects/00_blink_148/release/firmware.9bcf18e4/firmware.elf /usr/local/bin/arm-none-eabi-size /home/flanker/qtcreator_projects/00_blink_148/release/firmware.9bcf18e4/firmware.elf text data bss dec hex filename 1908 12 300 2220 8ac /home/flanker/qtcreator_projects/00_blink_148/release/firmware.9bcf18e4/firmware.elf Build done for configuration release.
И тут тоже размер релизной прошивки тютелька в тютельку. Но они не одно и тоже:
$ md5sum ./build/firmware.bin 08997fd09274d0430ec641de8e7590a9 ./build/firmware.bin $ md5sum ./release/firmware.9bcf18e4/firmware.bin ae292df7944e2c15c764f577c4350b25 ./release/firmware.9bcf18e4/firmware.bin
Теперь, в модуль "uart.c" можно добавить функцию печати вещественного числа:
#ifdef USE_FLOAT void usart1_print_float(float num) { if(num < 0.f) { usart1_send_char('-'); num = -num; } // Send integer part int32_t int_part = (int32_t)num; usart1_print_number(int_part); // Send decimal point usart1_send_char('.'); // Send first two decimal places float frac = num - int_part; uint32_t frac_part = (uint32_t)(frac * 100 + 0.5); // Rounding if(frac_part < 10) usart1_send_char('0'); // Leading zero usart1_print_number(frac_part); } #endif // USE_FLOAT
Строго говоря, функция печатает число с фиксированной точкой, с двумя знаками после запятой.
В switch-блок добавляем следующий кейс:
#ifdef USE_FLOAT case 'f': usart1_print_float(va_arg(args, double)); break; #endif // USE_FLOAT
В перечень используемых именованных констант в Makefile, CMakeLists.txt и Qbs-скрипт, следует добавить "USE_FLOAT", чтобы весь код использующий вещественные числа можно было легко выключить или включить.
После пересборки проекта, размер прошивки составит 4372 байт, т.е. в два раза больше чем было. К счастью, с флеш-памятью в 32-битных микроконтроллерах проблем нет, в отличии 8/16-битных.
В главном цикле модуля "main.c" будем вычислять синусы:
#ifdef USE_FLOAT for(float i = 0.f; ; i+=0.25f) { int remainder=smart_delay(interval); if (UART_RDY) { tick=uart_command_processing(tick); } if ( remainder > 0 ) { interval = remainder; continue; } else { interval =WAIT; } GPIOC->ODR ^= GPIO_Pin_13; // Toggle PC13 if (tick) { usart1_printf("tick: %f",i); usart1_printf(" hex: %x\r\n",(uint32_t)i); float sin=sinf((i * M_PI)/180.f); //градусы в радианы usart1_printf("sin: %f\r\n", sin); } } #else uint32_t cnt=0; while (1) { int remainder=smart_delay(interval); if (UART_RDY) { tick=uart_command_processing(tick); } if ( remainder > 0 ) { interval = remainder; continue; } else { interval =WAIT; } ++cnt; GPIOC->ODR ^= GPIO_Pin_13; // Toggle PC13 if (tick) { usart1_printf("tick - %u\r\n",cnt); } } #endif
В модуль "main.c" потребуется включить заголовочный файл "math.h":
#include "math.h"
После компиляции, размер прошивки составит 10172 байта:
arm-none-eabi-size --format=berkeley build/firmware.elf text data bss dec hex filename 10172 12 300 10484 28f4 build/firmware.elf
После перепрошивки в терминальной программе пойдет примерно такой лог:
tick: 5.50 hex: 0x5 sin: 0.10 tick: 5.75 hex: 0x5 sin: 0.10 tick: 6.00 hex: 0x6 sin: 0.10 tick: 6.25 hex: 0x6 sin: 0.11 tick: 6.50 hex: 0x6 sin: 0.11 tick: 6.75 hex: 0x6 sin: 0.12 tick: 7.00 hex: 0x7 sin: 0.12 tick: 7.25 hex: 0x7 sin: 0.13 tick: 7.50 hex: 0x7 sin: 0.13 tick: 7.75 hex: 0x7 sin: 0.13 tick: 8.00 hex: 0x8 sin: 0.14 tick: 8.25 hex: 0x8 sin: 0.14 tick: 8.50 hex: 0x8 sin: 0.15
Для проверки, синус восьми градусов равен 0,139.
Т.о. от создания минималистического "Blink" в 148 байт, мы дошли до 10-и килобайтной прошивки.
11) USART в режиме SPI-master
В микроконтроллере stm32f103c8 имеется три USART интерфейса, и если один использовать для отладки, остальные можно использовать как "слабенькие" SPI. В даташите указано, что на USART_1 максимальная скорость будет 4.5 Мбит, на USART_2 и USART_3 - 2.25 Мбит. Это немного, но для монохромного дисплея этого вполне достаточно. Для примера возьмем дисплей от Nokia 1202 на контроллере ste2007, о котором я рассказывал пару лет назад: "Общий обзор дисплея Nokia 1202". Дисплей использует 9-битный SPI протокол, который не поддерживается SPI модулем stm32f103xx, его можно реализовать только через USART, либо bit-bang'ом.
Использовать будем интерфейс USART_2:

Для подключения дисплея понадобится сконфигурировать ножки PA2(TX) и PA4(CLK) в альтернативный режим, а PB4(RST) и PA5(CS) в Push-Pull режим. Соответственно, первым делом понадобится включить тактирование для GPIOA, GPIOB и USART2:
RCC->APB2ENR |= RCC_APB2ENR_IOPAEN | RCC_APB2ENR_IOPBEN; // Enable GPIOA and GPIOB clocks RCC->APB1ENR |= RCC_APB1ENR_USART2EN; // Enable USART2 clock
После чего конфигурируем ножки:
// PB4 (RST) - General Purpose Output Push-Pull, 50MHz GPIOB->CRL &= ~(GPIO_CRL_CNF4 | GPIO_CRL_MODE4); GPIOB->CRL |= (GPIO_CRL_MODE4_0 | GPIO_CRL_MODE4_1); // MODE=11 (50 MHz) // PA2 (USART2_TX/MOSI) - Alternate Push-Pull, 50MHz GPIOA->CRL &= ~(GPIO_CRL_CNF2 | GPIO_CRL_MODE2); GPIOA->CRL |= (GPIO_CRL_CNF2_1 | GPIO_CRL_MODE2); // PA4 (USART2_CK/SCK) - Alternate Push-Pull, 50MHz GPIOA->CRL &= ~(GPIO_CRL_CNF4 | GPIO_CRL_MODE4); GPIOA->CRL |= (GPIO_CRL_CNF4_1 | GPIO_CRL_MODE4); // PA5 (CS) - General Purpose Output Push-Pull, 50MHz GPIOA->CRL &= ~(GPIO_CRL_CNF5 | GPIO_CRL_MODE5); GPIOA->CRL |= (GPIO_CRL_MODE5_0 | GPIO_CRL_MODE5_1); // Output, 50MHz
И последнее, конфигурируем USART_2 интерфейс в режим 9-битного синхронного USART:
USART2->BRR = 0x10; // 2.25 Mbps @ 36MHz APB1 USART2->CR2 = USART_CR2_CLKEN | // Enable clock output USART_CR2_STOP_1 | // 1 stop bit USART_CR2_LBCL; // тактовый импульс для 9-го бита USART2->CR1 = USART_CR1_M | // 9-bit data (M=1) USART_CR1_TE | // Enable transmitter USART_CR1_UE; // Enable USART
Этот режим также будет SPI. Т.е. данный режим передачи будет соответствовать двум протоколам: SPI и USART. На линии это выглядит так:

Передача одновременно является как USART, так и SPI.
Добавим в проект модуль "ste2007.c" и там разместим функцию передачи байта:
extern uint8_t reverse_bits_asm(uint32_t); void USART2_SPI_Write9(uint8_t dc,uint8_t data){ uint16_t packet=(uint16_t)reverse_bits_asm((uint32_t)data); packet= (packet<<1) | (dc & 0x01); GPIOA->BSRR = GPIO_BSRR_BR5; // PC5/CS low USART2->DR = packet; // Send 9-bit data while(!(USART2->SR & USART_FLAG_TC)); // Wait for transmit complete GPIOA->BSRR = GPIO_BSRR_BS5; // PC5/CS high }
Т.к. при UASRT протоколе данные передаются младшим битом вперед, а при SPI протоколе обычно данные передаются старшим битом вперед, то перед отправкой, данные следует "переворачивать". Для этого существуют различные алгоритмы, я долгое время пользовался примером подсмотренном на stackoverflow. Но т.к. функция отправки данных будет выполняться в цикле, я посчитал, что имеет смысл использовать вариант с аппаратной акселерацией, т.е. на ассемблере.
Это тоже можно осуществить по разному. Можно например, в ассемблерном модуле "startup.s", сразу после функции "Infinite_Loop" разместить код функции "reverse_bits_asm()", объявление которой фигурировало выше:
.global reverse_bits_asm reverse_bits_asm: rbit r0, r0 // Reverse bits lsr r0, r0, #24 // Shift right 24 bits bx lr
Но "startup.s" я бы трогать не хотел, и поэтому решил снова воспользоваться inline ассемблером, и добавил функцию в модуль "ste2007.c":
uint8_t reverse_bits_asm(uint32_t data) { uint32_t result; __asm volatile ( "rbit %[result], %[data]\n" // Reverse bits of input "lsr %[result], %[result], #24\n" // Get the reversed byte : [result] "=r" (result) // Output : [data] "r" (data) // Input : // No clobbers needed ); return (uint8_t)result; }
Далее понадобится функция инициализации дисплея:
void ste2007_init() { // Hardware reset GPIOB->BSRR = GPIO_BSRR_BR4; // Reset low delay_us(100); // Minimum 1µs, but 100µs is safer GPIOB->BSRR = GPIO_BSRR_BS4; // Reset high delay_us(100); // Wait after reset // Software initialization USART2_SPI_Write9(LCD_C, 0xE2); // Soft reset delay_us(100); USART2_SPI_Write9(LCD_C, 0x2F); // Power control set (charge pump on) delay_us(100); // Wait for charge pump stabilization USART2_SPI_Write9(LCD_C, 0xA0); // ADC select (normal orientation) USART2_SPI_Write9(LCD_C, 0xC8); // COM output scan direction (reverse) USART2_SPI_Write9(LCD_C, 0x94); // Electronic volume mode set (contrast, default value = 0x90 is normal) USART2_SPI_Write9(LCD_C, 0xA4); // Display all points OFF USART2_SPI_Write9(LCD_C, 0x40); // Display start line set to 0 USART2_SPI_Write9(LCD_C, 0xA6); // Normal display (not inverted) USART2_SPI_Write9(LCD_C, 0xAF); // Display ON // Set initial address (optional, can be done before writing data) USART2_SPI_Write9(LCD_C, 0xB0); // Set page address 0 USART2_SPI_Write9(LCD_C, 0x10); // Set column upper bits (0) USART2_SPI_Write9(LCD_C, 0x00); // Set column lower bits (0) }
В строке "USART2_SPI_Write9(LCD_C, 0x94);" я увеличил контрастность. Она варьируется от 0х80 до 0х9f, и дефолтным значением является 0х90. Но при выводе анимации контрастность снижается (дисплей немного моргает при перезаписи видеопамяти), поэтому я выставил значение 0х94.
Для отрисовки графики потребуется фрейм-буфер:
#define LCD_C 0x00 #define LCD_D 0x01 #define LCD_X 96 #define LCD_Y 68 #define LCD_LINE 9 #define LCD_LEN LCD_LINE * LCD_X // display buffer volatile uint8_t fb[LCD_LEN]; // screen buffer
А для работы с фрейм-буфером понадобятся функции заливки и вывода буфера на дисплей:
// work with buffer void ste2007_fill(uint8_t value) { for(int i=0;i<LCD_LEN; i++) fb[i]=value; } void ste2007_update_display() { USART2_SPI_Write9(LCD_C, 0xB0); // set page address USART2_SPI_Write9(LCD_C, 0x10); // set col=0 upper 3 bits USART2_SPI_Write9(LCD_C, 0x00); // set col=0 lower 4 bits USART2_SPI_Write9(LCD_C, 0x40); // set row 0 for(uint32_t i=0;i<LCD_LEN; i++) USART2_SPI_Write9(LCD_D,fb[i]); }
Вывод буфера на дисплей занимает 5.58 мс. Т.е. при анимации 30fps, на вывод буфера будет уходить 167.5 мс или 16.75 % времени работы CPU. Технически, можно перекинуть дисплей на USART_1, но на мой взгляд, 16 и 8 - это числа одного порядка, и какого-то ощутимого профита получить не получится.
Для создания тестовой анимации, добавим в модуль "ste2007.c" функцию заполнения буфера вертикальными линиями:
void ste2007_vertical_lines(uint8_t line_count, uint8_t spacing, uint8_t value) { // Calculate actual spacing based on requested line count and display width if (line_count == 0) return; // No lines requested, zero division exception, when line_count and spacing is 0 // Calculate spacing if not specified (0 means auto-calculate) if (spacing == 0) { spacing = LCD_X / line_count; } // Clear the frame buffer ste2007_clear(); // Draw vertical lines at regular intervals for (uint8_t col = 0; col < LCD_X; col += spacing) { // For each page (vertical 8-pixel block) for (uint8_t page = 0; page < LCD_LINE; page++) { // Calculate position in frame buffer uint16_t pos = page * LCD_X + col; if (pos < LCD_LEN) { fb[pos] = value; } } } }
Чтобы функция рисовала линии с равными интервалами, нужно указывать число линий, которое без остатка делится на 96. Например:
ste2007_vertical_lines(12,0,0xff); // 12 vertical solid lines
Для анимации потребуется функция горизонтального скроллинга. Дисплей Nokia 1202 - это бюджетный дисплей, там имеется аппаратная функция "вертикального" сколлинга (Row by row), что бы можно было мотать текст. Горизонтальный скроллинг приходится делать программно. :
void ste2007_horizont_scroll(int8_t direction) { uint8_t temp; // For each line (page) in the display for (int page = 0; page < LCD_LINE; page++) { if (direction > 0) { // Scroll right // Save the rightmost byte temp = fb[(page + 1) * LCD_X - 1]; // Shift all bytes right for (int col = LCD_X - 1; col > 0; col--) { fb[page * LCD_X + col] = fb[page * LCD_X + col - 1]; } // Put saved byte at the beginning fb[page * LCD_X] = temp; } else { // Scroll left // Save the leftmost byte temp = fb[page * LCD_X]; // Shift all bytes left for (int col = 0; col < LCD_X - 1; col++) { fb[page * LCD_X + col] = fb[page * LCD_X + col + 1]; } // Put saved byte at the end fb[(page + 1) * LCD_X - 1] = temp; } }
Скролл может быть как вправо, так и влево.
Итак, программа будет такой. Заполняем буфер вертикальными линиями и включаем скроллинг. Что бы скроллинг был более-менее плавным, нужно функцию "ste2007_horizont_scroll()" запускать хотя бы 20 раз в секунду. Это потребует изменений в главном цикле, который отрабатывает 1 раз в секунду. Уменьшим задержку в главном цикле до 50 мс, а для светодиода введем специальный счетчик, который будет считать до 20, и переключать светодиод. Получилось как-то так:
// Constants and initialization bool tick_enabled=true; const uint32_t DEFAULT_INTERVAL = WAIT_MS; // 50 milliseconds uint32_t interval = DEFAULT_INTERVAL; uint32_t toggle_interval=1000/interval; // led interval is 1000ms uint32_t toggle_counter=toggle_interval; // led interval multiplier ste2007_init(); // Initialize display ste2007_vertical_lines(12,0,0xff); // 12 vertical solid lines ste2007_update_display(); for(uint32_t cycle_count = 0; ; cycle_count++) { // 1. Handle system delays and commands int32_t remaining_delay = smart_delay(interval); // Process UART commands if received if (UART_RDY) { tick_enabled = uart_command_processing(tick_enabled); } // 2. Update interval for next cycle interval = (remaining_delay > 0) ? (uint32_t)remaining_delay : DEFAULT_INTERVAL; // 3. Execute periodic tasks when delay completes if (remaining_delay <= 0 && --toggle_counter == 0) { // Toggle LED on PC13 GPIOC->ODR ^= GPIO_Pin_13; toggle_counter=toggle_interval; // Optional debug output if (tick_enabled) { usart1_printf("Cycle: %u\r\n", cycle_count/toggle_interval); } } // LCD draw ste2007_horizont_scroll(1); // scroll to right ste2007_update_display(); }
В результате работы программы на дисплее будут бегущие вправо вертикальные линии.
Под спойлерами полный код "main.c" и "ste2007.c":
показать main.cпоказать ste2007.c
#include "ste2007.h" #include "utils.h" #include "stm32f10x_usart.h" #define LCD_C 0x00 #define LCD_D 0x01 #define LCD_X 96 #define LCD_Y 68 #define LCD_LINE 9 #define LCD_LEN LCD_LINE * LCD_X // display buffer volatile uint8_t fb[LCD_LEN]; // screen buffer void USART2_SPI_Write9(uint8_t dc,uint8_t data); uint8_t reverse_bits_asm(uint32_t); void ste2007_update_display(); void ste2007_init() { // Hardware reset GPIOB->BSRR = GPIO_BSRR_BR4; // Reset low delay_us(100); // Minimum 1µs, but 100µs is safer GPIOB->BSRR = GPIO_BSRR_BS4; // Reset high delay_us(100); // Wait after reset // Software initialization USART2_SPI_Write9(LCD_C, 0xE2); // Soft reset delay_us(100); USART2_SPI_Write9(LCD_C, 0x2F); // Power control set (charge pump on) delay_us(100); // Wait for charge pump stabilization USART2_SPI_Write9(LCD_C, 0xA0); // ADC select (normal orientation) USART2_SPI_Write9(LCD_C, 0xC8); // COM output scan direction (reverse) USART2_SPI_Write9(LCD_C, 0x94); // Electronic volume mode set (contrast, default value = 0x90 is normal) USART2_SPI_Write9(LCD_C, 0xA4); // Display all points OFF USART2_SPI_Write9(LCD_C, 0x40); // Display start line set to 0 USART2_SPI_Write9(LCD_C, 0xA6); // Normal display (not inverted) USART2_SPI_Write9(LCD_C, 0xAF); // Display ON // Set initial address (optional, can be done before writing data) USART2_SPI_Write9(LCD_C, 0xB0); // Set page address 0 USART2_SPI_Write9(LCD_C, 0x10); // Set column upper bits (0) USART2_SPI_Write9(LCD_C, 0x00); // Set column lower bits (0) } // work with buffer void ste2007_fill(uint8_t value) { for(int i=0;i<LCD_LEN; i++) fb[i]=value; } void ste2007_vertical_lines(uint8_t line_count, uint8_t spacing, uint8_t value) { // Calculate actual spacing based on requested line count and display width if (line_count == 0) return; // No lines requested, zero division exception, when line_count and spacing is 0 // Calculate spacing if not specified (0 means auto-calculate) if (spacing == 0) { spacing = LCD_X / line_count; } // Clear the frame buffer ste2007_clear(); // Draw vertical lines at regular intervals for (uint8_t col = 0; col < LCD_X; col += spacing) { // For each page (vertical 8-pixel block) for (uint8_t page = 0; page < LCD_LINE; page++) { // Calculate position in frame buffer uint16_t pos = page * LCD_X + col; if (pos < LCD_LEN) { fb[pos] = value; } } } } void ste2007_update_display() { USART2_SPI_Write9(LCD_C, 0xB0); // set page address USART2_SPI_Write9(LCD_C, 0x10); // set col=0 upper 3 bits USART2_SPI_Write9(LCD_C, 0x00); // set col=0 lower 4 bits USART2_SPI_Write9(LCD_C, 0x40); // set row 0 for(uint32_t i=0;i<LCD_LEN; i++) USART2_SPI_Write9(LCD_D,fb[i]); } void ste2007_horizont_scroll(int8_t direction) { uint8_t temp; // For each line (page) in the display for (int page = 0; page < LCD_LINE; page++) { if (direction > 0) { // Scroll right // Save the rightmost byte temp = fb[(page + 1) * LCD_X - 1]; // Shift all bytes right for (int col = LCD_X - 1; col > 0; col--) { fb[page * LCD_X + col] = fb[page * LCD_X + col - 1]; } // Put saved byte at the beginning fb[page * LCD_X] = temp; } else { // Scroll left // Save the leftmost byte temp = fb[page * LCD_X]; // Shift all bytes left for (int col = 0; col < LCD_X - 1; col++) { fb[page * LCD_X + col] = fb[page * LCD_X + col + 1]; } // Put saved byte at the end fb[(page + 1) * LCD_X - 1] = temp; } } } void USART2_SPI_Write9(uint8_t dc,uint8_t data){ uint16_t packet=(uint16_t)reverse_bits_asm((uint32_t)data); packet= (packet<<1) | (dc & 0x01); GPIOA->BSRR = GPIO_BSRR_BR5; // PC5/CS low USART2->DR = packet; // Send 9-bit data while(!(USART2->SR & USART_FLAG_TC)); // Wait for transmit complete GPIOA->BSRR = GPIO_BSRR_BS5; // PC5/CS high } uint8_t reverse_bits_asm(uint32_t data) { uint32_t result; __asm volatile ( "rbit %[result], %[data]\n" // Reverse bits of input "lsr %[result], %[result], #24\n" // Get the reversed byte : [result] "=r" (result) // Output : [data] "r" (data) // Input : // No clobbers needed ); return (uint8_t)result; }
12) USART + DMA в режиме SPI-master
Сейчас у нас имеется относительно быстрый процессор и относительно медленная линия передачи, которая вынуждает процессор постоянно находиться в простое. Большую часть времени во время передачи данных, процессор находится в функции "USART2_SPI_Write9()", в этой строке:
while(!(USART2->SR & USART_FLAG_TC)); // Wait for transmit complete
Т.е. он ждет, пока медленная периферия передаст очередной пакет на линию. Чтобы освободить процессор для чего-то более полезного, можно воспользоваться DMA.
DMA - это механизм, который позволяет "в фоне", т.е. без участия CPU, копировать данные из одного места в другое, включая периферию. Для отправки фрейм-буфера через DMA, потребуется подготовить данные, предварительно выполнив операции по переворачиванию битов и дополнению 9-м D/C битом, после чего достаточно будет запустить передачу, и пойти выполнять какие-то другие задачи, в то время как "в фоне" будет происходить передача буфера через USART. Единственное, что перед следующей отправкой данных, следует проверять, завершилась ли предыдущая.
Т.к. 9-битные данные - это фактически 16-битные, для DMA потребуется второй 16-битный буфер:
volatile uint16_t fb_dma[LCD_LEN]; // DMA Buffer
Перед передачей на линию, данные из первого буфера следует скопировать во второй, выполнив при этом все преобразования. Для проверки правильности преобразований, создадим новую функцию, которая будет выводить данные на дисплей со второго буфера:
void ste2007_update_dma_buffer() { for (int i=0; i<LCD_LEN; i++) { uint16_t packet=(uint16_t)reverse_bits_asm((uint32_t)fb[i]); packet= (packet<<1) | (uint16_t)0x01; fb_dma[i]=packet; } // setting coordinates position to origin USART2_SPI_Write9(LCD_C, 0xB0); // set page address USART2_SPI_Write9(LCD_C, 0x10); // set col=0 upper 3 bits USART2_SPI_Write9(LCD_C, 0x00); // set col=0 lower 4 bits USART2_SPI_Write9(LCD_C, 0x40); // set row 0 GPIOA->BSRR = GPIO_BSRR_BR5; // PC5/CS low // Wait for previous transfer to complete while(!(USART2->SR & USART_SR_TC)); for (int i=0; i<LCD_LEN; i++) { USART2->DR = fb_dma[i]; // Send 9-bit data while(!(USART2->SR & USART_FLAG_TC)); // Wait for transmit complete } GPIOA->BSRR = GPIO_BSRR_BS5; // PC5/CS high }
Эта функция заменяет "ste2007_update_display()". Она состоит из трех блоков: 1) копирования данных из первого буфера во второй, выполняя при этом преобразования, 2) затем устанавливается указатель видеопамяти дисплея на начало, 3) после чего передаются данные на дисплей со второго буфера.
Здесь немного был изменен порядок работы с CS-пином. Он теперь щелкает не на каждый передаваемый байт, а лишь зажимает линию в начале передачи, и отпускает ее в конце. Во время передачи по DMA мы не сможем "щелкать" CS-пином, т.к. передача будет происходить через USART, для которого CS-пин не предусмотрен. Поэтому не лишним было проверить, примет ли такие данные дисплей.
На логическом анализаторе начало передачи выглядит так:

Видно отрабатывание CS-сигнала четыре раза при передаче команд установки указателя видеопамяти, после чего сплошным пакетом идут данные.
Можно немного доработать алгоритм, если четыре команды установки указателя видеопамяти упаковать в буфер, который будет выводиться. Для этого потребуется увеличить размер буфера на четыре полуслова, и вместо отправки команд, вписать эти команды в начало буфера, не забыв применить преобразования. Тогда код будет следующим:
#define CMD_LEN 4 volatile uint16_t fb_dma[LCD_LEN+CMD_LEN]; // DMA Buffer void ste2007_update_dma_buffer() { // command for setting coordinates position to origin fb_dma[0]=(uint16_t)(reverse_bits_asm((uint32_t)0xB0)<<1); // set page address fb_dma[1]=(uint16_t)(reverse_bits_asm((uint32_t)0x10)<<1); // set col=0 upper 3 bits fb_dma[2]=(uint16_t)(reverse_bits_asm((uint32_t)0x00)<<1); // set col=0 lower 4 bits fb_dma[3]=(uint16_t)(reverse_bits_asm((uint32_t)0x40)<<1); // set row 0 for (int i=CMD_LEN; i<(LCD_LEN+CMD_LEN); i++) { uint16_t packet=(uint16_t)reverse_bits_asm((uint32_t)fb[i-CMD_LEN]); packet= (packet<<1) | (uint16_t)0x01; fb_dma[i]=packet; } GPIOA->BSRR = GPIO_BSRR_BR5; // PC5/CS low // Wait for previous transfer to complete while(!(USART2->SR & USART_SR_TC)); for (int i=0; i<(LCD_LEN+CMD_LEN); i++) { USART2->DR = fb_dma[i]; // Send 9-bit data while(!(USART2->SR & USART_FLAG_TC)); // Wait for transmit complete } GPIOA->BSRR = GPIO_BSRR_BS5; // PC5/CS high }
Что касается DMA, то в STM32F103C8 имеется два DMA контроллера, один на 7 каналов, второй на 5. Между этими каналами разбросана вся периферия микроконтроллера, и для USART2_TX нужен будет седьмой канал первого DMA контроллера:

Главный конфигурационный регистр DMA - это DMA_CCR:

Описание его флагов следующее:
Флаги регистра DMA_CCR (биты) Бит(ы) Имя Описание --------------------------------------------------------------------- 0 EN Включить канал - 0: Канал отключен - 1: Канал включен --------------------------------------------------------------------- 1 TCIE Прерывание по завершения передачи - 0: Прерывание отключено - 1: Прерывание включено (срабатывает после завершения передачи) --------------------------------------------------------------------- 2 HTIE Прерывание по заверешении половины передачи - 0: Прерывание отключено - 1: Прерывание включено (срабатывает при половине передачи) --------------------------------------------------------------------- 3 TEIE Прерывание при ошибке передачи - 0: Прерывание отключено - 1: Прерывание включено (срабатывает при ошибке передачи) --------------------------------------------------------------------- 4 DIR Направление передачи данных - 0: Чтение с периферийного устройства (Периферийное устройство → Память) - 1: Чтение из памяти (Память → Периферийное устройство) --------------------------------------------------------------------- 5 CIRC Циклический (бесконечный) режим - 0: Циклический режим отключен - 1: Включен циклический режим (вызывает автоматическую перезагрузку счетчиков) --------------------------------------------------------------------- 6 PINC Инкремент (увеличение) периферийного адреса - 0: Периферийный адрес фиксированный - 1: Периферийный адрес увеличивается после передачи --------------------------------------------------------------------- 7 MINC Инкремент (увеличение) адреса памяти - 0: Адрес памяти фиксированный - 1: Адрес памяти увеличивается после передачи --------------------------------------------------------------------- 8:9 PSIZE Размер данных периферии - 00: 8-бит - 01: 16-бит - 10: 32-бит --------------------------------------------------------------------- 10:11 MSIZE Размер данных памяти - 00: 8-бит - 01: 16-бит - 10: 32-бит --------------------------------------------------------------------- 12:13 PL Уровень приоритета канала - 00: Низкий - 01: Средний - 10: Высокий - 11: Очень высокий --------------------------------------------------------------------- 14 MEM2MEM Режим «память-в-память» - 0: Отключено (передача периферийных устройств ↔ памяти) - 1: Включено (передача память ↔ память)
Чтобы сконфигурировать DMA на передачу буфера через DMA, следует в модуле "main.c" включить тактирование DMA1:
RCC->AHBENR |= RCC_AHBENR_DMA1EN; // Enable DMA1 clock
И разрешить прерывание 7-го канала DMA1 в контролере прерываний:
NVIC_EnableIRQ(DMA1_Channel7_IRQn);
В модуле "ste2007.c" потребуется ввести еще одну глобальную переменную, которая будет устанавливаться в значение "true", в обработчике прерывания DMA после завершения передачи:
volatile bool dma_complete = true;
Добавляем обработчик прерывания:
// DMA interrupt handler void DMA1_Channel7_IRQHandler(void) { if(DMA1->ISR & DMA_ISR_TCIF7) { DMA1->IFCR |= DMA_IFCR_CTCIF7; // Clear flag dma_complete = true; GPIOA->BSRR = GPIO_BSRR_BS5; // Release CS // Cleanup USART2->CR3 &= ~USART_CR3_DMAT; DMA1_Channel7->CCR &= ~DMA_CCR7_EN; } }
В функции "ste2007_update_dma_buffer()" будет конфигурирование DMA и запуск передачи:
int ste2007_update_dma_buffer() { int timeout=0; while (!dma_complete) { if (++timeout > 10000) return STATUS_ERROR; } // command for setting coordinates position to origin fb_dma[0]=(uint16_t)(reverse_bits_asm((uint32_t)0xB0)<<1); // set page address fb_dma[1]=(uint16_t)(reverse_bits_asm((uint32_t)0x10)<<1); // set col=0 upper 3 bits fb_dma[2]=(uint16_t)(reverse_bits_asm((uint32_t)0x00)<<1); // set col=0 lower 4 bits fb_dma[3]=(uint16_t)(reverse_bits_asm((uint32_t)0x40)<<1); // set row 0 for (int i=CMD_LEN; i<(LCD_LEN+CMD_LEN); i++) { uint16_t packet=(uint16_t)reverse_bits_asm((uint32_t)fb[i-CMD_LEN]); packet= (packet<<1) | (uint16_t)0x01; fb_dma[i]=packet; } // Configure DMA1 Channel 7 (USART2_TX) DMA1_Channel7->CPAR = (uint32_t)&(USART2->DR); // Peripheral address DMA1_Channel7->CMAR = (uint32_t)fb_dma; // Memory address (frame buffer) DMA1_Channel7->CNDTR = LCD_LEN+CMD_LEN; // Number of data items DMA1_Channel7->CCR = DMA_CCR7_MINC | // Memory increment DMA_CCR7_MSIZE_0 | // Memory Size is 16-Bit DMA_CCR7_PSIZE_0 | // Peripheral Size is 16-Bit DMA_CCR7_DIR | // Memory-to-peripheral DMA_CCR7_TCIE | // Transfer complete interrupt DMA_CCR7_PL; // High priority DMA1->IFCR |= DMA_IFCR_CTCIF7; // Clear flag dma_complete = false; GPIOA->BSRR = GPIO_BSRR_BR5; // PC5/CS low // Enable USART DMA TX DMA1_Channel7->CCR |= DMA_CCR7_EN; // Enable DMA USART2->CR3 |= USART_CR3_DMAT;
Здесь через регистр DMA_CCR устанавливается: 16-битный размер данных буфера и регистра периферии (DMA_CCR7_MSIZE_0 и DMA_CCR7_PSIZE_0), однопроходной режим работы (CIRC=0), инкремент адреса буфера во время передачи (DMA_CCR7_MINC=1), вызов прерывания по завершении передачи (DMA_CCR7_TCIE=1).
После завершения конфигурации DMA и запуска передачи, функция завершает работу, т.е. она не ждет окончания передачи.
При использовании DMA время передачи буфера через USART2 сократилось с 5.5 мс до 4.5 мс за счет уменьшения интервалов между пакетами clock сигналов до 1.5 мкс (было 2.5 мкс).

Если ранее, на вывод анимации расходовалось 16.75 % времени работы CPU, то теперь эта операция осуществляется "в фоне", без участия CPU.
Полные версии "main.c" и "ste2007.c" под спойлерами:
показать main.c#include "stm32f10x.h" #include "stm32f10x_gpio.h" #include "stm32f10x_rcc.h" #include "stm32f10x_usart.h" #include "stdbool.h" #include "main.h" #include "utils.h" #include "uart.h" #include "math.h" #include "ste2007.h" extern bool UART_RDY; uint32_t SystemCoreClock = 72000000; // Clock STM32F103 at reset int main() { // --- RCC configuration ------- RCC->APB2ENR |= RCC_APB2ENR_IOPCEN; // Enable GPIOC clock RCC->APB2ENR |= RCC_APB2ENR_IOPBEN; // Enable GPIOB clock RCC->APB2ENR |= RCC_APB2ENR_IOPAEN | RCC_APB2ENR_USART1EN; // Enable GPIOA and USART1 clocks RCC->APB1ENR |= RCC_APB1ENR_USART2EN; // Enable USART2 clock RCC->AHBENR |= RCC_AHBENR_DMA1EN; // Enable DMA1 clock // --- GPIO configuration ---- // Configure PC13 as push-pull output (max speed 2 MHz) GPIOC->CRH &= ~(GPIO_CRH_CNF13 | GPIO_CRH_MODE13); GPIOC->CRH |= GPIO_CRH_MODE13_1; // Output mode, max speed 2 MHz (0b10) // Configure PA9 as alternate function push-pull (TX) GPIOA->CRH &= ~(GPIO_CRH_CNF9 | GPIO_CRH_MODE9); // Clear bits GPIOA->CRH |= (GPIO_CRH_CNF9_1 | GPIO_CRH_MODE9); // Alternate function output, max speed 50 MHz // Configure PA10 as input floating (RX) GPIOA->CRH &= ~(GPIO_CRH_CNF10 | GPIO_CRH_MODE10); // Clear bits GPIOA->CRH |= GPIO_CRH_CNF10_0; // Floating input // --- USART2 configuration --- // Configure GPIO pins // PB4 (RST) - General Purpose Output Push-Pull, 50MHz GPIOB->CRL &= ~(GPIO_CRL_CNF4 | GPIO_CRL_MODE4); GPIOB->CRL |= (GPIO_CRL_MODE4_0 | GPIO_CRL_MODE4_1); // MODE=11 (50 MHz) // PA2 (USART2_TX/MOSI) - Alternate Push-Pull, 50MHz GPIOA->CRL &= ~(GPIO_CRL_CNF2 | GPIO_CRL_MODE2); GPIOA->CRL |= (GPIO_CRL_CNF2_1 | GPIO_CRL_MODE2); // PA4 (USART2_CK/SCK) - Alternate Push-Pull, 50MHz GPIOA->CRL &= ~(GPIO_CRL_CNF4 | GPIO_CRL_MODE4); GPIOA->CRL |= (GPIO_CRL_CNF4_1 | GPIO_CRL_MODE4); // PA5 (CS) - General Purpose Output Push-Pull, 50MHz GPIOA->CRL &= ~(GPIO_CRL_CNF5 | GPIO_CRL_MODE5); GPIOA->CRL |= (GPIO_CRL_MODE5_0 | GPIO_CRL_MODE5_1); // Output, 50MHz // Configure USART2 for 9-bit SPI Master Mode //USART2->BRR = 0x138; // 115200 baud @ 36MHz APB1 USART2->BRR = 0x10; // 2.25Mbps @ 36MHz (0x10 = 16 → 36MHz/16=2.25MHz) USART2->CR2 = USART_CR2_CLKEN | // Enable clock output USART_CR2_STOP_1 | // 1 stop bit USART_CR2_LBCL; // тактовый импульс для 9-го бита USART2->CR1 = USART_CR1_M | // 9-bit data (M=1) USART_CR1_TE | // Enable transmitter USART_CR1_UE; // Enable USART // --- UART1 configuration --- //USART1->BRR = 0x1d4c; // 9600 baud @ 72 MHz (APB2) USART1->BRR = 0x271; // 115200 baud @ 72MHz (APB2) USART1->CR1 = USART_CR1_TE | USART_CR1_RE | USART_CR1_UE; // Enable TX, RX and USART // Enable RX interrupt (Optional) USART1->CR1 |= USART_CR1_RXNEIE; NVIC_EnableIRQ(USART1_IRQn); NVIC_EnableIRQ(DMA1_Channel7_IRQn); // ---- SysTick Configuration ---- systick_init(); // Let's go.. __enable_irq(); usart1_print_string("System ready...\r\n"); // Constants and initialization bool tick_enabled=true; const uint32_t DEFAULT_INTERVAL = WAIT_MS; // 50 milliseconds uint32_t interval = DEFAULT_INTERVAL; uint32_t toggle_interval=1000/interval; // led interval is 1000ms uint32_t toggle_counter=toggle_interval; // led interval multiplier ste2007_init(); // Initialize display ste2007_vertical_lines(12,0,0xff); // 12 vertical solid lines ste2007_update_dma_buffer(); for(uint32_t cycle_count = 0; ; cycle_count++) { // 1. Handle system delays and commands int32_t remaining_delay = smart_delay(interval); // Process UART commands if received if (UART_RDY) { tick_enabled = uart_command_processing(tick_enabled); } // 2. Update interval for next cycle interval = (remaining_delay > 0) ? (uint32_t)remaining_delay : DEFAULT_INTERVAL; // 3. Execute periodic tasks when delay completes if (remaining_delay <= 0 && --toggle_counter == 0) { // Toggle LED on PC13 GPIOC->ODR ^= GPIO_Pin_13; toggle_counter=toggle_interval; // Optional debug output if (tick_enabled) { usart1_printf("Cycle: %u\r\n", cycle_count/toggle_interval); } } // LCD draw ste2007_horizont_scroll(1); // scroll to right ste2007_update_dma_buffer(); } }
показать ste2007.c
#include "ste2007.h" #include "main.h" #include "utils.h" #include "stm32f10x_usart.h" #include "stdbool.h" #define LCD_C 0x00 #define LCD_D 0x01 volatile bool dma_complete = true; // display buffers volatile uint8_t fb[LCD_LEN]; // Screen Buffer volatile uint16_t fb_dma[LCD_LEN+CMD_LEN]; // DMA Buffer void USART2_SPI_Write9(uint8_t dc,uint8_t data); uint8_t reverse_bits_asm(uint32_t); // DMA interrupt handler void DMA1_Channel7_IRQHandler(void) { if(DMA1->ISR & DMA_ISR_TCIF7) { DMA1->IFCR |= DMA_IFCR_CTCIF7; // Clear flag dma_complete = true; GPIOA->BSRR = GPIO_BSRR_BS5; // Release CS // Cleanup USART2->CR3 &= ~USART_CR3_DMAT; DMA1_Channel7->CCR &= ~DMA_CCR7_EN; } } void ste2007_init() { // Hardware reset GPIOB->BSRR = GPIO_BSRR_BR4; // Reset low delay_us(100); // Minimum 1µs, but 100µs is safer GPIOB->BSRR = GPIO_BSRR_BS4; // Reset high delay_us(100); // Wait after reset // Software initialization USART2_SPI_Write9(LCD_C, 0xE2); // Soft reset delay_us(100); USART2_SPI_Write9(LCD_C, 0x2F); // Power control set (charge pump on) delay_us(100); // Wait for charge pump stabilization USART2_SPI_Write9(LCD_C, 0xA0); // ADC select (normal orientation) USART2_SPI_Write9(LCD_C, 0xC8); // COM output scan direction (reverse) USART2_SPI_Write9(LCD_C, 0x94); // Electronic volume mode set (contrast, default value = 0x90 is normal) USART2_SPI_Write9(LCD_C, 0xA4); // Display all points OFF USART2_SPI_Write9(LCD_C, 0x40); // Display start line set to 0 USART2_SPI_Write9(LCD_C, 0xA6); // Normal display (not inverted) USART2_SPI_Write9(LCD_C, 0xAF); // Display ON // Set initial address (optional, can be done before writing data) USART2_SPI_Write9(LCD_C, 0xB0); // Set page address 0 USART2_SPI_Write9(LCD_C, 0x10); // Set column upper bits (0) USART2_SPI_Write9(LCD_C, 0x00); // Set column lower bits (0) } // work with buffer void ste2007_fill(uint8_t value) { for(int i=0;i<LCD_LEN; i++) fb[i]=value; } void ste2007_vertical_lines(uint8_t line_count, uint8_t spacing, uint8_t value) { // Calculate actual spacing based on requested line count and display width if (line_count == 0) return; // No lines requested, zero division exception, when line_count and spacing is 0 // Calculate spacing if not specified (0 means auto-calculate) if (spacing == 0) { spacing = LCD_X / line_count; } // Clear the frame buffer ste2007_clear(); // Draw vertical lines at regular intervals for (uint8_t col = 0; col < LCD_X; col += spacing) { // For each page (vertical 8-pixel block) for (uint8_t page = 0; page < LCD_LINE; page++) { // Calculate position in frame buffer uint16_t pos = page * LCD_X + col; if (pos < LCD_LEN) { fb[pos] = value; } } } } void ste2007_update_display() { USART2_SPI_Write9(LCD_C, 0xB0); // set page address USART2_SPI_Write9(LCD_C, 0x10); // set col=0 upper 3 bits USART2_SPI_Write9(LCD_C, 0x00); // set col=0 lower 4 bits USART2_SPI_Write9(LCD_C, 0x40); // set row 0 for(uint32_t i=0;i<LCD_LEN; i++) USART2_SPI_Write9(LCD_D,fb[i]); } void ste2007_horizont_scroll(int8_t direction) { uint8_t temp; // For each line (page) in the display for (int page = 0; page < LCD_LINE; page++) { if (direction > 0) { // Scroll right // Save the rightmost byte temp = fb[(page + 1) * LCD_X - 1]; // Shift all bytes right for (int col = LCD_X - 1; col > 0; col--) { fb[page * LCD_X + col] = fb[page * LCD_X + col - 1]; } // Put saved byte at the beginning fb[page * LCD_X] = temp; } else { // Scroll left // Save the leftmost byte temp = fb[page * LCD_X]; // Shift all bytes left for (int col = 0; col < LCD_X - 1; col++) { fb[page * LCD_X + col] = fb[page * LCD_X + col + 1]; } // Put saved byte at the end fb[(page + 1) * LCD_X - 1] = temp; } } } int ste2007_update_dma_buffer() { int timeout=0; while (!dma_complete) { if (++timeout > 10000) return STATUS_ERROR; } // command for setting coordinates position to origin fb_dma[0]=(uint16_t)(reverse_bits_asm((uint32_t)0xB0)<<1); // set page address fb_dma[1]=(uint16_t)(reverse_bits_asm((uint32_t)0x10)<<1); // set col=0 upper 3 bits fb_dma[2]=(uint16_t)(reverse_bits_asm((uint32_t)0x00)<<1); // set col=0 lower 4 bits fb_dma[3]=(uint16_t)(reverse_bits_asm((uint32_t)0x40)<<1); // set row 0 for (int i=CMD_LEN; i<(LCD_LEN+CMD_LEN); i++) { uint16_t packet=(uint16_t)reverse_bits_asm((uint32_t)fb[i-CMD_LEN]); packet= (packet<<1) | (uint16_t)0x01; fb_dma[i]=packet; } // Configure DMA1 Channel 7 (USART2_TX) DMA1_Channel7->CPAR = (uint32_t)&(USART2->DR); // Peripheral address DMA1_Channel7->CMAR = (uint32_t)fb_dma; // Memory address (frame buffer) DMA1_Channel7->CNDTR = LCD_LEN+CMD_LEN; // Number of data items DMA1_Channel7->CCR = DMA_CCR7_MINC | // Memory increment DMA_CCR7_MSIZE_0 | // Memory Size is 16-Bit DMA_CCR7_PSIZE_0 | // Peripheral Size is 16-Bit DMA_CCR7_DIR | // Memory-to-peripheral DMA_CCR7_TCIE | // Transfer complete interrupt DMA_CCR7_PL; // High priority DMA1->IFCR |= DMA_IFCR_CTCIF7; // Clear flag dma_complete = false; GPIOA->BSRR = GPIO_BSRR_BR5; // PC5/CS low // Enable USART DMA TX DMA1_Channel7->CCR |= DMA_CCR7_EN; // Enable DMA USART2->CR3 |= USART_CR3_DMAT; return STATUS_OK; } void USART2_SPI_Write9(uint8_t dc,uint8_t data){ uint16_t packet=(uint16_t)reverse_bits_asm((uint32_t)data); packet= (packet<<1) | (dc & 0x01); GPIOA->BSRR = GPIO_BSRR_BR5; // PC5/CS low USART2->DR = packet; // Send 9-bit data while(!(USART2->SR & USART_FLAG_TC)); // Wait for transmit complete GPIOA->BSRR = GPIO_BSRR_BS5; // PC5/CS high } uint8_t reverse_bits_asm(uint32_t data) { uint32_t result; __asm volatile ( "rbit %[result], %[data]\n" // Reverse bits of input "lsr %[result], %[result], #24\n" // Get the reversed byte : [result] "=r" (result) // Output : [data] "r" (data) // Input : // No clobbers needed ); return (uint8_t)result; }
13) Битовая память в Cortex-M3
В Cortex-M3 имеется два региона с битовой памятью, один для ОЗУ, другой для периферийных регистров. Каждый байт такой памяти соответствует каком-либо биту ОЗУ или биту периферийных регистров. Битовая память для ОЗУ находится по адресам 0х22000000 - 0х23FFFFFC и охватывает один мегабайт ОЗУ. Битовая память для регистров периферийных устройств находится по адресам 0х42000000 - 0х43FFFFFC.
Если взять адрес ОЗУ =0х20000000, то нулевому биту будет соответствовать адрес 0х22000000, первому биту 0х22000001, второму биту 0х22000002, и т.д. Имеются нехитрые формулы для расчета смещения того или иного бита, они приведены в " Coretx-M3 Technical Reference Manual - глава 4.2"

В адреса битовой памяти можно записать или считать только два значения: ноль или единица.
Теперь давайте подумаем. Сейчас каждый пиксель дисплея упакован в какой-либо байт фрейм-буфера. И если бы была нужна функция рисования точки, то сперва нужно было бы рассчитать байт в котором упакован пиксель, потом считать этот байт, поменять нужный бит, и записать байт обратно в массив. Это так называемая процедура: Read - Modify - Write или RMW. Как-то так:
void ste2007_draw_pixel_rmw(uint8_t x, uint8_t y, bool color) { uint8_t page = y / 8; uint8_t bit = y % 8; uint16_t idx = page * LCD_X + x; if (color) fb[idx] |= (1 << bit); else fb[idx] &= ~(1 << bit); }
В случае же использования битовой памяти, нужно лишь рассчитать смещение для адреса нужного бита, и просто записать в него новое значение:
#define BITBAND_SRAM_REF 0x20000000 #define BITBAND_SRAM_BASE 0x22000000 #define BITBAND_ADDR(addr, bit) (BITBAND_SRAM_BASE + (((uint32_t)(addr) - BITBAND_SRAM_REF) * 32) + (bit) * 4) // Set/Clear a pixel at (x,y) with color (1=on, 0=off) void ste2007_draw_pixel(uint8_t x, uint8_t y, bool color) { // 1. Validate coordinates (Nokia 1202: 96x68 pixels) if (x >= LCD_X || y >= LCD_Y) return; // 2. Calculate framebuffer position uint8_t page = y / 8; // Each page = 8 rows uint16_t fb_index = page * LCD_X + x; // 3. Get bit-band address for atomic operation volatile uint32_t *bitband_addr = (volatile uint32_t*)BITBAND_ADDR(&fb[fb_index], y % 8); // 4. Set/clear the bit *bitband_addr = color ? 1 : 0; }
Это у нас функция рисования точки. Еще нам понадобится нециклическая функция горизонтального скроллинга, т.е. когда изображение "уплывает" за край, оно не появлется вновь с другой стороны.
void ste2007_horizontal_scroll_non_cyclic(int8_t direction) { // For each line (page) in the display for (int page = 0; page < LCD_LINE; page++) { if (direction > 0) { // Scroll right // Shift all bytes right for (int col = LCD_X - 1; col > 0; col--) { fb[page * LCD_X + col] = fb[page * LCD_X + col - 1]; } // Put empty byte at the beginning fb[page * LCD_X] = 0; } else { // Scroll left // Shift all bytes left for (int col = 0; col < LCD_X - 1; col++) { fb[page * LCD_X + col] = fb[page * LCD_X + col + 1]; } // Put empty byte at the end fb[(page + 1) * LCD_X - 1] = 0; } } }
Эта функция упрощенная версия предыдущей циклической версии "ste2007_horizont_scroll()".
В главном цикле модуля "main.c" будем рисовать функцию синуса:
bool tick_enabled=true; const uint32_t DEFAULT_INTERVAL = WAIT_MS; // 50 milliseconds uint32_t interval = DEFAULT_INTERVAL; uint32_t toggle_interval=1000/interval; // led interval is 1000ms uint32_t toggle_counter=toggle_interval; // led interval multiplier ste2007_init(); // Initialize display ste2007_fill(0x0); //ste2007_vertical_lines(12,0,0xff); // 12 vertical solid lines ste2007_update_dma_buffer(); for(float cycle_count = 0.f; ; cycle_count += 5.f) { // 1. Handle system delays and commands int32_t remaining_delay = smart_delay(interval); // Process UART commands if received if (UART_RDY) { tick_enabled = uart_command_processing(tick_enabled); } // 2. Update interval for next cycle interval = (remaining_delay > 0) ? (uint32_t)remaining_delay : DEFAULT_INTERVAL; // 3. Execute periodic tasks when delay completes if (remaining_delay <= 0 && --toggle_counter == 0) { // Toggle LED on PC13 GPIOC->ODR ^= GPIO_Pin_13; toggle_counter=toggle_interval; // Optional debug output if (tick_enabled) { usart1_printf("Cycle: %u\r\n", (int)cycle_count/toggle_interval); } } // LCD draw float sin=sinf((cycle_count * M_PI)/180.f); //градусы в радианы sin = sin *20.f +32; ste2007_horizontal_scroll_non_cyclic(1); // scroll to right ste2007_draw_pixel(0,(uint32_t)sin,1); ste2007_update_dma_buffer(); }
Здесь при каждой новой итерации суперцикла вычисляем функцию синуса, масштабируем значение относительно размера дисплея, и заносим значение в первый столбец фрейм-буфера. В результате получаем график бегущей синусоиды:

В принципе, сейчас все готово, чтобы в режиме реального времени отображать данные с АЦП, но делать это будем на другом дисплее.
14) Semihosting
Я предлагаю на время забыть про какие-либо дисплеи, и откатиться на пункт: "Числа с плавающей запятой, подключение стандартной библиотеки Си к проекту", когда к проекту был подключен лишь ST-Link и USB-UART преобразователь.
На мой взгляд цеплять USB-UART преобразователь к BluePill не очень удобно. С помощью semihosting можно выводить отладочные сообщения прямо через ST-Link.
Semihosting - это отладочная технология ARM, через нее можно использовать функции ввода-вывода, загружать файлы и пр. В документации ARM приведен список операций осуществляемых с помощью semihosting:
* angel_SWIreason_EnterSVC (0x17) * angel_SWIreason_ReportException (0x18) * SYS_CLOSE (0x02) * SYS_CLOCK (0x10) * SYS_ELAPSED (0x30) * SYS_ERRNO (0x13) * SYS_FLEN (0x0C) * SYS_GET_CMDLINE (0x15) * SYS_HEAPINFO (0x16) * SYS_ISERROR (0x08) * SYS_ISTTY (0x09) * SYS_OPEN (0x01) * SYS_READ (0x06) * SYS_READC (0x07) * SYS_REMOVE (0x0E) * SYS_SEEK (0x0A) * SYS_SYSTEM (0x12) * SYS_TICKFREQ (0x31) * SYS_TIME (0x11) * SYS_TMPNAM (0x0D) * SYS_WRITE (0x05) * SYS_WRITEC (0x03) * SYS_WRITE0 (0x04)
Еще из плюсов semihosting'а - USART микроконтроллера не будет занят под отладку, он будет свободен для чего-то более полезного.
Минусы использования semihosting: некоторая медлительность и несколько увеличенный размер прошивки. Чтобы нивелировать последнее обстоятельство, потребуется доработать сборочные файлы: Makefile и CMakeLists.txt добавив профили сборки Debug и Release, чтобы в релизную прошивку не тащить отладочный код.
Чтобы использовать semihosting, нужно вызвать функцию "initialise_monitor_handles()". В "main.c" пишем следующее:
#ifdef DEBUG // Semihosting low-level functions extern void initialise_monitor_handles(void); void enable_semihosting() { // Check if debugger is connected before initializing if (CoreDebug->DHCSR & CoreDebug_DHCSR_C_DEBUGEN_Msk) { initialise_monitor_handles(); printf("Debugger connected, semihosting ready\n"); } } #endif int main() { #ifdef DEBUG // Initialize semihosting enable_semihosting(); #endif
Здесь проверка:
if (CoreDebug->DHCSR & CoreDebug_DHCSR_C_DEBUGEN_Msk)
нужна для того, чтобы прошивка была работоспособной и без подключенного отладчика. Далее, после переключения светодиода в главном цикле, добавляем отладочный вывод:
#ifdef DEBUG if (CoreDebug->DHCSR & CoreDebug_DHCSR_C_DEBUGEN_Msk) { printf("semihosting tick - %u\r\n",(unsigned int)cnt); } #endif
Здесь приведение типов "(unsigned int)cnt" нужно из-за того, что мой компилятор и линтер (cppcheck) не могли решить какого типа переменная "cnt". Компилятор утверждал, что "long unsigned int", а линтер был несогласен. Приведение типов устроило всех.
Полный текст "main.c" приведен ниже под спойлером.
показать main.c#include "stm32f10x.h" #include "stm32f10x_gpio.h" #include "stm32f10x_rcc.h" #include "stm32f10x_usart.h" #include "stdbool.h" #include "main.h" #include "utils.h" #include "uart.h" #include <stdio.h> extern volatile bool UART_RDY; uint32_t SystemCoreClock = 72000000; // Clock STM32F103 at reset #ifdef DEBUG // Semihosting low-level functions extern void initialise_monitor_handles(void); void enable_semihosting() { // Check if debugger is connected before initializing if (CoreDebug->DHCSR & CoreDebug_DHCSR_C_DEBUGEN_Msk) { initialise_monitor_handles(); printf("Debugger connected, semihosting ready\n"); } } #endif int main() { #ifdef DEBUG // Initialize semihosting enable_semihosting(); #endif // --- RCC configuration ------- RCC->APB2ENR |= RCC_APB2Periph_GPIOC; // Enable GPIOC clock RCC->APB2ENR |= RCC_APB2ENR_IOPAEN | RCC_APB2ENR_USART1EN; // Enable GPIOA and USART1 clocks // --- GPIO configuration ---- // Configure PC13 as push-pull output (max speed 2 MHz) GPIOC->CRH &= ~(GPIO_CRH_CNF13 | GPIO_CRH_MODE13); GPIOC->CRH |= GPIO_CRH_MODE13_1; // Output mode, max speed 2 MHz (0b10) // Configure PA9 as alternate function push-pull (TX) GPIOA->CRH &= ~(GPIO_CRH_CNF9 | GPIO_CRH_MODE9); // Clear bits GPIOA->CRH |= (GPIO_CRH_CNF9_1 | GPIO_CRH_MODE9); // Alternate function output, max speed 50 MHz // Configure PA10 as input floating (RX) GPIOA->CRH &= ~(GPIO_CRH_CNF10 | GPIO_CRH_MODE10); // Clear bits GPIOA->CRH |= GPIO_CRH_CNF10_0; // Floating input // --- UART configuration --- //USART1->BRR = 0x1d4c; // 9600 baud @ 72 MHz (APB2) USART1->BRR = 0x271; // 115200 baud @ 72MHz (APB2) USART1->CR1 = USART_CR1_TE | USART_CR1_RE | USART_CR1_UE; // Enable TX, RX and USART // Enable RX interrupt (Optional) USART1->CR1 |= USART_CR1_RXNEIE; NVIC_EnableIRQ(USART1_IRQn); // ---- SysTick Configuration ---- systick_init(); // Let's go.. __enable_irq(); // set variables bool tick=true; // Super loop usart1_print_string("ready...\r\n"); uint32_t interval=WAIT; // milliseconds for(uint32_t cnt=0; ; cnt++) { int remainder=smart_delay(interval); if (UART_RDY) { tick=uart_command_processing(tick); } if ( remainder > 0 ) { interval = remainder; continue; } else { interval =WAIT; } GPIOC->ODR ^= GPIO_Pin_13; // Toggle PC13 #ifdef DEBUG if (CoreDebug->DHCSR & CoreDebug_DHCSR_C_DEBUGEN_Msk) { printf("semihosting tick - %u\r\n",(unsigned int)cnt); } #endif if (tick) { usart1_printf("tick - %u\r\n",cnt); } } }
При линковке проекта, нужно опцию "--specs=nosys.specs" заменить на "--specs=rdimon.specs -lc -lrdimon".
Готовый Makefile вышел таким:
# Toolchain setup
CC = arm-none-eabi-gcc
AS = arm-none-eabi-gcc
OBJCOPY = arm-none-eabi-objcopy
SIZE = arm-none-eabi-size
RM = rm -f
# Target and output names
TARGET = firmware
BIN = $(TARGET).bin
HEX = $(TARGET).hex
ELF = $(TARGET).elf
# Directory structure
ifeq ($(DEBUG),1)
BUILD_DIR = debug_build
else
BUILD_DIR = build
endif
SRC_DIR = src
ASM_DIR = asm
INC_DIR = inc
PROJECT_ROOT = .
# Source files
SRCS_C = $(wildcard $(SRC_DIR)/*.c) $(wildcard $(PROJECT_ROOT)/main.c)
SRCS_S = $(wildcard $(ASM_DIR)/*.s)
OBJS = $(patsubst $(SRC_DIR)/%.c,$(BUILD_DIR)/%.o,$(filter $(SRC_DIR)/%,$(SRCS_C))) \
$(patsubst $(PROJECT_ROOT)/%.c,$(BUILD_DIR)/%.o,$(filter $(PROJECT_ROOT)/%,$(SRCS_C))) \
$(patsubst $(ASM_DIR)/%.s,$(BUILD_DIR)/%.o,$(SRCS_S))
# Include paths
INC = -I$(INC_DIR) -I$(PROJECT_ROOT) -ICMSIS/device -ICMSIS/core -ISPL/inc
# Defines
DEF = -DSTM32F10X_MD
DEF += -DSYSCLK_FREQ_72MHz
ifeq ($(DEBUG),1)
DEF += -DDEBUG
endif
# MCU and flags
MCU = cortex-m3
CFLAGS = -mcpu=$(MCU) -mthumb -Wall -ggdb -Og -ffunction-sections -fdata-sections $(INC) $(DEF)
ASFLAGS = -mcpu=$(MCU) -mthumb -ggdb
ifeq ($(DEBUG),1)
LDFLAGS = -T stm32f10xx8.ld -Wl,--gc-sections --specs=nano.specs --specs=rdimon.specs -lc -lrdimon
else
LDFLAGS = -T stm32f10xx8.ld -Wl,--gc-sections --specs=nosys.specs --specs=nano.specs
endif
# Build rules
all: $(BUILD_DIR)/$(BIN) $(BUILD_DIR)/$(HEX) size
$(BUILD_DIR)/$(ELF): $(OBJS)
@mkdir -p $(@D)
$(CC) $(CFLAGS) $^ -o $@ $(LDFLAGS)
# Rule for C files in src directory
$(BUILD_DIR)/%.o: $(SRC_DIR)/%.c
@mkdir -p $(@D)
$(CC) -c $(CFLAGS) $< -o $@
# Rule for main.c in project root
$(BUILD_DIR)/%.o: $(PROJECT_ROOT)/%.c
@mkdir -p $(@D)
$(CC) -c $(CFLAGS) $< -o $@
# Rule for assembly files
$(BUILD_DIR)/%.o: $(ASM_DIR)/%.s
@mkdir -p $(@D)
$(AS) -c $(ASFLAGS) $< -o $@
$(BUILD_DIR)/$(BIN): $(BUILD_DIR)/$(ELF)
$(OBJCOPY) -O binary $< $@
$(BUILD_DIR)/$(HEX): $(BUILD_DIR)/$(ELF)
$(OBJCOPY) -O ihex $< $@
debug: $(BUILD_DIR)/$(ELF)
arm-none-eabi-gdb -ex "target extended-remote :3333" \
-ex "monitor arm semihosting enable" \
-ex "load" \
-ex "continue" \
$<
size: $(BUILD_DIR)/$(ELF)
$(SIZE) --format=berkeley $<
flash: $(BUILD_DIR)/$(BIN)
st-flash write $< 0x08000000
clean:
$(RM) -r $(BUILD_DIR)
.PHONY: all size flash clean
Работает это так. Обычная сборка и прошивка работает также как обычно:
$ make clean && make # сборка $ make flash # прошивка
Размер релизной прошивки:
$ make size
arm-none-eabi-size --format=berkeley build/firmware.elf
text data bss dec hex filename
2200 12 300 2512 9d0 build/firmware.elf
Сборка отладочной версии:
$ make DEBUG=1 clean && make DEBUG=1 all
rm -f -r debug_build
arm-none-eabi-gcc -c -mcpu=cortex-m3 -mthumb -Wall -ggdb -Og -ffunction-sections -fdata-sections -Iinc -I. -ICMSIS/device -ICMSIS/core -ISPL/inc -DSTM32F10X_MD -DSYSCLK_FREQ_72MHz -DDEBUG src/system_init.c -o debug_build/system_init.o
arm-none-eabi-gcc -c -mcpu=cortex-m3 -mthumb -Wall -ggdb -Og -ffunction-sections -fdata-sections -Iinc -I. -ICMSIS/device -ICMSIS/core -ISPL/inc -DSTM32F10X_MD -DSYSCLK_FREQ_72MHz -DDEBUG src/utils.c -o debug_build/utils.o
arm-none-eabi-gcc -c -mcpu=cortex-m3 -mthumb -Wall -ggdb -Og -ffunction-sections -fdata-sections -Iinc -I. -ICMSIS/device -ICMSIS/core -ISPL/inc -DSTM32F10X_MD -DSYSCLK_FREQ_72MHz -DDEBUG src/uart.c -o debug_build/uart.o
arm-none-eabi-gcc -c -mcpu=cortex-m3 -mthumb -Wall -ggdb -Og -ffunction-sections -fdata-sections -Iinc -I. -ICMSIS/device -ICMSIS/core -ISPL/inc -DSTM32F10X_MD -DSYSCLK_FREQ_72MHz -DDEBUG main.c -o debug_build/main.o
arm-none-eabi-gcc -c -mcpu=cortex-m3 -mthumb -ggdb asm/startup.s -o debug_build/startup.o
arm-none-eabi-gcc -mcpu=cortex-m3 -mthumb -Wall -ggdb -Og -ffunction-sections -fdata-sections -Iinc -I. -ICMSIS/device -ICMSIS/core -ISPL/inc -DSTM32F10X_MD -DSYSCLK_FREQ_72MHz -DDEBUG debug_build/system_init.o debug_build/uart.o debug_build/utils.o debug_build/main.o debug_build/startup.o -o debug_build/firmware.elf -T stm32f10xx8.ld -Wl,--gc-sections --specs=nano.specs --specs=rdimon.specs -lc -lrdimon
arm-none-eabi-objcopy -O binary debug_build/firmware.elf debug_build/firmware.bin
arm-none-eabi-objcopy -O ihex debug_build/firmware.elf debug_build/firmware.hex
arm-none-eabi-size --format=berkeley debug_build/firmware.elf
text data bss dec hex filename
8068 124 492 8684 21ec debug_build/firmware.elf
Разница 6 КБ, на мой взгляд не так много. Без использования newlib, размер отладочной прошивки достигал 35 КБ, это половина флеш-памяти микроконтроллера.
Далее подключаем микроконтроллер через ST-Link. Предположим, что используем мультиплексор screen. Тогда в одном окне запускаем openOCD командой:
$ openocd -f interface/stlink-v2.cfg -f target/stm32f1x.cfg
В другом окне запускаем отладчик:
$ arm-none-eabi-gdb ./debug_build/firmware.elf
Подключаемся к OpenOCD:
(gdb) target extended-remote :3333
Remote debugging using :3333
0x08001aa6 in _swistat ()
(gdb)
Останавливаем выполнение текущей программы:
(gdb) monitor reset halt
[stm32f1x.cpu] halted due to debug-request, current mode: Thread
xPSR: 0x01000000 pc: 0x08000780 msp: 0x20005000
(gdb)
Включаем semihosting:
(gdb) monitor arm semihosting enable
semihosting is enabled
(gdb)
Загружаем прошивку:
(gdb) load
Loading section .isr_vector, size 0x130 lma 0x8000000
Loading section .text, size 0x1cb4 lma 0x8000130
Loading section .rodata, size 0x1a0 lma 0x8001de4
Loading section .init_array, size 0x4 lma 0x8001f84
Loading section .fini_array, size 0x4 lma 0x8001f88
Loading section .data, size 0x74 lma 0x8001f8c
Start address 0x08000780, load size 8192
Transfer rate: 13 KB/sec, 1365 bytes/write.
(gdb)
Запускаем программу:
(gdb) continue
Continuing.
И в окне где запущен OpenOCD увидим вывод отладочных сообщений:

И если посмотреть на время отправки сообщений через UART, то видно, что semihosting подтормаживает где-то на 100 мс.
Ввод всех этих команд можно автоматизировать, достаточно будет набрать команду:
$ make DEBUG=1 debug
И все запустится автоматом. OpenOCD только надо не забыть запустить.
CMakeLists.txt тоже получился объемным, спрятал под спойлер.
показать CMakeLists.txtcmake_minimum_required(VERSION 3.12) project(firmware LANGUAGES C ASM) set(CMAKE_VERBOSE_MAKEFILE OFF) # Toolchain setup set(CMAKE_SYSTEM_NAME Generic) set(CMAKE_SYSTEM_PROCESSOR arm) set(CMAKE_C_COMPILER arm-none-eabi-gcc) set(CMAKE_ASM_COMPILER arm-none-eabi-gcc) set(CMAKE_OBJCOPY arm-none-eabi-objcopy) set(CMAKE_SIZE arm-none-eabi-size) # Build type configuration if(NOT CMAKE_BUILD_TYPE) set(CMAKE_BUILD_TYPE "Release" CACHE STRING "Choose build type: Debug or Release" FORCE) endif() # Target and output names set(TARGET firmware) set(ELF ${TARGET}.elf) set(BIN ${TARGET}.bin) set(HEX ${TARGET}.hex) # Directory structure set(BUILD_DIR ${CMAKE_BINARY_DIR}) set(SRC_DIR src) set(ASM_DIR asm) set(INC_DIR inc) # Source files file(GLOB SRCS_C ${SRC_DIR}/*.c ${CMAKE_SOURCE_DIR}/main.c ) file(GLOB SRCS_S ${ASM_DIR}/*.s) # Include paths set(INC ${INC_DIR} ${CMAKE_SOURCE_DIR} CMSIS/device CMSIS/core SPL/inc ) # Compiler definitions add_definitions(-DSTM32F10X_MD -DSYSCLK_FREQ_72MHz) # MCU and flags set(MCU cortex-m3) set(CWARN "-Wall") set(CMAKE_C_FLAGS_DEBUG "-mcpu=${MCU} -mthumb ${CWARN} -g -Og -ffunction-sections -fdata-sections") set(CMAKE_C_FLAGS_RELEASE "-mcpu=${MCU} -mthumb ${CWARN} -g -Os -ffunction-sections -fdata-sections") set(CMAKE_ASM_FLAGS "-mcpu=${MCU} -mthumb -g") set(LINKER_SCRIPT "${CMAKE_SOURCE_DIR}/stm32f10xx8.ld") # Debug-specific configuration (with semihosting) if(CMAKE_BUILD_TYPE STREQUAL "Debug") add_definitions(-DDEBUG) set(CMAKE_EXE_LINKER_FLAGS "-specs=nano.specs -specs=rdimon.specs -lc -lrdimon -T${LINKER_SCRIPT} -Wl,--gc-sections") else() # Release configuration set(CMAKE_EXE_LINKER_FLAGS "-specs=nosys.specs -specs=nano.specs -T${LINKER_SCRIPT} -Wl,--gc-sections") endif() # Create executable add_executable(${ELF} ${SRCS_C} ${SRCS_S}) target_include_directories(${ELF} PRIVATE ${INC}) # Generate binary and hex files add_custom_command(TARGET ${ELF} POST_BUILD COMMAND ${CMAKE_OBJCOPY} -O binary ${ELF} ${BIN} COMMAND ${CMAKE_OBJCOPY} -O ihex ${ELF} ${HEX} COMMENT "Generating ${BIN} and ${HEX}" ) # Size target add_custom_target(size COMMAND ${CMAKE_SIZE} --format=berkeley ${ELF} DEPENDS ${ELF} ) # Flash target add_custom_target(flash COMMAND st-flash write ${BIN} 0x08000000 DEPENDS ${BIN} ) # Debug target with semihosting (only for Debug builds) if(CMAKE_BUILD_TYPE STREQUAL "Debug") add_custom_target(debug COMMAND arm-none-eabi-gdb -ex "target extended-remote :3333" -ex "monitor arm semihosting enable" -ex "load" -ex "continue" ${ELF} DEPENDS ${ELF} COMMENT "Starting debug session with semihosting" ) endif() # Install target (optional) install(FILES ${BIN} DESTINATION bin)
Использование. Создаем каталог для сборки проекта и переходим в него:
$ mkdir cbuild && cd $_
Сборка релизной прошивки:
$ cmake -DCMAKE_BUILD_TYPE=Release .. $ make all && make size
Прошивка:
$ make flash
Сборка отладочной прошивки:
$ cmake -DCMAKE_BUILD_TYPE=Debug .. $ make all && make size
Запуск отладочной прошивки аналогичен использованию Makefile. В одном окне запускаем OpenOCD:
$ openocd -f interface/stlink-v2.cfg -f target/stm32f1x.cfg
В другом окне - отладчик с прошивкой:
$ make debug
Qbs-скрипт приводить не буду, он будет на git, там минимальные изменения, т.к. скрипт уже содержит раздельные профили компиляции, а команды OpenOCD следует добавлять в профиль устройства BareMetal.
В QtCreator отладочные сообщения попадают в окно "Application Output":

15) UART в полудуплексном режиме в качестве драйвера шины 1-Wire
Еще одной интересной особенностью USART интерфейса явлется работа в полудуплексном режиме, когда прием и передача осуществляется по одному проводу. И такой режим можно использовать для работы с датчиками, которые к USART не имеют никакого отношения. Например датчик DS18B20 с протоколом 1-Wire.
Как это работает? В самом простом приближении, у нас имеется шина подтянутая к питанию. UART протокол имеет неотключаемый стартовый бит, поэтому нельзя просто послать какой-либо байт в USARTx_DR, стартовый бит обязательно приведет к ложному срабатыванию. Однако можно посылать байты через USART в качестве битов на шине. В частности, посылка байта "0х00" приведет к передачи "широкого" импульса, а передача значения "0xFF" приведет к передачи узкого импульса, т.к. передан будет лишь стартовый бит:

Регулировать ширину импульсов можно с помощью изменения скорости передачи, или с помощью самих передаваемых значений. Например: 0xFF - это короткий импульс, 0х00 - это широкий импульс, а 0xF0 - это половина от широкого. Главное не забывать, что UART передает данные младшим битом вперед.
Второй аспект, как производить чтение с такой шины, ведь для UART требуется опять же стартовый бит про который устройство скорее всего знать не знает?
Все эти вопросы подробно рассмотренны в "APP 244 Using a UART to Implement a 1-Wire Bus Master" 2002 года от фирмы Maxim. В частности, там предлагается использовать скорость 9600 Baud для передачи импульса cброса (480 мкс + 480 мкс), а для передачи команд и для чтения использовать скорость 115200 Baud. Для организации полудуплекса предлагается использовать следующее подключение UART к 1-Wire шине:

Я же хотел использовать "обычное" подключение датчика к микроконтроллеру, которое требует одного резистора:

В Bluepill остался один неиспользуемый UART - это USART_3, который так же как USART_2 подключен к "медленной" шине APB1 с максимальной частотой 36 МГц. Использовать будем TX ножку данного интерфейса - PB10:

Инициализация интерфейса в полудуплексный режим осуществлется так:
void ds18b20_usart3_init(void) { // GPIO and USART3 clock enable RCC->APB1ENR |= RCC_APB1ENR_USART3EN; RCC->APB2ENR |= RCC_APB2ENR_IOPBEN; // PB10 (USART3_TX) as open-drain GPIOB->CRH &= ~(GPIO_CRH_CNF10 | GPIO_CRH_MODE10); GPIOB->CRH |= ((uint32_t)0x00000C00); // Alternate Open-drain mode/* GPIO_CRH_CNF10_1; // Open-drain GPIOB->CRH |= GPIO_CRH_MODE10_1; // 2MHz output // USART3 configuration USART3->CR3 |= USART_CR3_HDSEL; // enable half-duplex mode USART3->CR1 |= USART_CR1_TE | USART_CR1_RE | USART_CR1_UE; // enable transmit, receive, USART enable }
Здесь включается тактирование периферии: GPIO_B и USART_3. Затем ножка PB10, та которая USART3_TX переводится в Alternate Open-Drain режим. И тут кроется неочевидный момент: "а почему именно Alternate Open-drain, а не Open-drain?". Работать будут оба варианта (проверьте!). Если верить интернетам, в режиме Open-drain ножка PB10 микроконтроллера будет остается свободной (плавающей), пока передатчик не решит что-то передать. После завершения передачи, ножка опять переводится в floating (плавающий) режим. Различие режимов Alternate Open-drain и Open-drain сводится к тому, что в обоих случаях при передачи нулевого бита ножка зажимается на землю, а при передачи единичного бита в Altenate Open-drain режиме ножка зажимается к pull-up подтяжке, а в Open-drain режиме переводится в плавающее (floating) состояние. Опять же, если верить интернетам.
У меня работали оба варианта, но при режиме Alternate Open-drain мне удалось реализовать драйвер для работы с 1-Wire шиной без использования функций задержки "delay_us()".
Теперь пройдемся немного о 1-Wire протоколе. Как и все асинхронные протоколы, 1-Wire основан на временных интервалах. Если например в UART имеется несколько скоростей, здесь скорость только одна, но у таймингов очень широкие временные границы. Это делает протокол более универсальным, доступным устройствам с разными частотами. Временные интервалы протокола приведены в следующей таблице:

Приведу ссылки на документацию к датчику DS18B20:
DS18B20 DataSheet
DS18B20 Перевод официального руководства
Для начала работы с датчиком DS18B20 нужно будет подать сигнал сброса:

Сигнал сброса формируется прижиманием шины к земле мастером (т.е. микроконтроллером) на 480 мкс (минимум). Затем мастер должен ждать еще 480 мкс (минимум). Если датчик услышал мастера, то после 15-60 мкс после того как мастер отпустит шину, датчик в свою очередь должен прижать шину на 60-240 мкс.
В "APP 244 Using a UART to Implement a 1-Wire Bus Master" процедура передачи сигнала Reset на 1-Wire шину посредством UART описана следующими образом:

С помощью автопереводчика я перевел текст, чтобы было понятнее:
На рисунке 4 показано, что для генерации импульса сброса и обнаружения сигнала присутствия, используется скорость передачи данных 9600 бод. Передача 0xF0 от UART формирует соответствующий импульс сброса. Значение приема зависит от наличия одного или нескольких подчиненных 1-Wire устройств и их внутренней синхронизации. Если 1-Wire устройство отсутствует на шине, значение приема будет равно значению передачи. В противном случае значение приема может различаться. Одно ведомое устройство, работающее с минимальной внутренней синхронизацией, изменит ответ на 0xE0. Одно ведомое устройство, работающее с максимальной внутренней синхронизацией, изменит ответ на 0x90.
Функция сброса и чтения ответа от датчика посредством USART на stm32f103 выглядит так:
#define DS18B20_RESET_BAUD 9600 #define DS18B20_STANDARD_BAUD 115200 #define DS18B20_RESET_TIMEOUT 10000 #define DS18B20_PRESENCE_TIMEOUT 10000 bool ds18b20_reset() { // More robust reset with timeout uint32_t timeout = DS18B20_RESET_TIMEOUT; // Adjust based on your clock // Drive line low USART3->BRR = APB1_Clock / DS18B20_RESET_BAUD; USART3->DR = 0xF0; // send on line "__|¯¯¯" // Wait for transmission complete with timeout while (!(USART3->SR & USART_SR_TC) && timeout--); if(timeout == 0) return false; while (!(USART3->SR & USART_SR_RXNE)); uint8_t ret=USART3->DR; // Release line and switch to higher baud rate USART3->BRR = APB1_Clock / DS18B20_STANDARD_BAUD; return (ret == 0xE0); }
Здесь в начале USART интерфейс переключается на скорость 9600 baud. Затем на линию посылается байт "0xF0". Т.к. в UART обмен идет младшим битом вперед, то при передаче младшего полубайта (nibble - (анг) огрызок, полубайт) линия прижимается к земле, а когда настает черед старшего полубайта, шина отпускается. Эта последовательность формирует сигнал сброса на 1-Wire шине.
Далее, дожидаемся когда UART передаст на шину весь байт:
while (!(USART3->SR & USART_SR_TC) && timeout--);
И дальше самое интересное, читаем с шины:
while (!(USART3->SR & USART_SR_RXNE)); uint8_t ret=USART3->DR;
В переменную "ret" должно вернуть значение "0хE0", т.к. ответ датчика обнуляет четвертый бит и "0xF0" превращается в "0xE0". Если вы НЕ будете осуществлять чтение после передачи сигнала сброса, то значение "0xE0" всплывет когда начнете читать температуру с датчика. Т.е. это значение появляется в USARTx_DR регистре во время передачи сигнала сброса и сидит там пока его не считать (т.к. устанавливается флаг переполнения - ORE, который блокирует дальнейшую перезапись USARTx_DR). А почему оно там появлется? Тут вопрос скорее про схемотехнику, как организуется режим полудуплекса. И насколько я понимаю, линии TX и RX попросту соединяются, а когда так происходит, то получается эхо-устройство. Это когда RX получает то, что посылает TX. Выше была цитата из аппнота:
Если 1-Wire устройство отсутствует на шине, значение приема будет равно значению передачи
А в случае, когда ведомое устройство присутствует на линии, ответ датчика обнуляет четвертый бит, и получается "0xE0". Т.е. происходит логическое умножение двух сигналов: (lsb)"00001111"(msb) от UART и (lsb)"11110111"(msb) от датчика.
Наиболее наглядно это можно увидеть на логическом анализаторе:

Можно видеть, что декодер логического анализатора преобразовал UART сигнал в значение "0xE0". Хотя на мой взгляд, ответ датчика датчика лежит между 5-м и 4-м битами.
Рассмотрим порядок передачи данных. Передача нуля происходит следующими таймслотами:

Здесь, интервал между таймслотами должен составлять как минимум 1 мкс. Для передачи нуля нужно прижать шину на время от 60 до 120 мкс. Для передачи единицы нужно прижать шину на 1-15 мкс, после чего отпустить шину на 60 мкс.
Передача байта на шину 1-Wire посредством UART модуля stm32f103c8 осуществлется следующими функциями:
void ds18b20_write_bit(bool bit) { USART3->DR = bit ? 0xff : 0x0; // Send start bit + data bits while (!(USART3->SR & USART_SR_TC)); } uint8_t ds18b20_write_byte(uint8_t byte) { USART3->BRR = APB1_Clock / DS18B20_STANDARD_BAUD; for (int i = 0; i < 8; i++) { ds18b20_write_bit(byte & 0x01); byte >>= 1; } while (!(USART3->SR & USART_SR_RXNE)); uint8_t ret=USART3->DR; return ret; }
Здесь чтение в переменную "ret" в конце функции "ds18b20_write_byte()" нужно чтобы очистить DR регистр на случай, если после записи пойдет чтение. А возвращение результата чтения нужно чтобы оптимизатор не выкинул этот код.
На логическом анализаторе передача команды "skip ROM" с кодом "0хСС" выглядит следующими образом:

С интервалами здесь такая картинка:

В принципе, в интервалы попадаем. (94-8)=86 мкс отпускается шина при передачи единицы , может быть это немного многовато, но между таймслотами еще идет интервал, так что ничего страшного.
Для чтения бита от ведомого устройства, мастер (микроконтроллер) формирует таймслоты чтения:

Общая длина таймслота 60-120 мкс. Для формирования таймслота шина прижимается к земле на время от 1 до 15 мкс, после чего она отпускается. И если датчик передает ноль, то он удерживает шину в прижатом состоянии, в противном случае, оставляет ее свободной. По прошествии 15 мкс от начала слота, микроконтроллер может прочитать ответ датчика.
Чтение ответа датчика DS18B20 работает также, как получение отклика от датчика при передаче Reset. Только тут скорость 115200 бод и UART посылает только стартовый бит, а значащие биты посылает датчик. Т.е. тут так же происходит логическое умножение сигналов UART'а и DS18B20. Функция для чтения ответа датчика DS18B20 получилась такой:
uint16_t ds18b20_read() { uint16_t byte = 0; for (int i = 0; i < 16; i++) { // Generate read time slot (pull low for at least 1µs) USART3->DR = 0xff; // Send start bit (low) while (!(USART3->SR & USART_SR_RXNE)); // Wait for data uint8_t bit = USART3->DR & 0x01; byte |= ((uint16_t)bit << i); } return byte; }
На логическом анализаторе чтение датчика выглядит так:

Если у вас установлен PulseView (это программа бесплатная) можете посмотреть записанные логи сессии в непосредственно там "ссылка на архив". Для сравнения я добавил в архив запись сессии опроса DS18B20 c помощью библиотеки Arduino, которую брал из этого howto . На этой сессии декодер показывает слишком короткие тайминги, но в принципе, работало нормально.
Для опроса датчика в суперцикле модуля "main.c" размещаем следующий код:
if (ds18b20_reset()) { ds18b20_write_byte(0xCC); // skip ROM ds18b20_write_byte(0x44); // start convert delay_ms(800); if (ds18b20_reset()) { ds18b20_write_byte(0xCC); // skip ROM ds18b20_write_byte(0xBE); // start read uint16_t temp=ds18b20_read(); uint16_t frac= ((temp & (uint16_t)0x0f)*10)/16; temp >>= 4; usart1_printf("Temperature= %u.%u\r\n",temp,frac); } }
лог работы получается следующий:

Или, если использовать semihosting:

Полученный драйвер умеет работать только с одним датчиком на шине, и это не может считаться полноценным драйвером датчика DS18B20, но т.к. темы термометра, метеостанции и часов являются "вечными" в среде радиолюбителей, то возможно, в приложении полее подробно разберу эту тему.
16) USB CDC драйвер для STM32F103 - Virtual COM port
С помощью semihosting'а можно выводить какую-то отладочную информацию без использования USB-UART преобразователя, но это работает только в режиме отладки. Однако, микроконтроллер STM32F103 оснащен USB интерфейсом, и для коммуникации с чипом можно использовать его вместо USB-UART преобразователя.
USB-FS драйвер для stm32f103 можно скачать с официального сайта ST по ссылке STM32F10x, STM32L1xx and STM32F3xx USB full speed device library (альтернативная ссылка). Там же можно найти документацию к этому драйверу: "UM0424 - User manual STM32 USB-FS-Device development kit".
Условно, драйвер состоит из библиотек: CMSIS, SPL и самого USB-FS драйвера:
CMSIS STM32F10x_StdPeriph_Driver STM32F30x_StdPeriph_Driver STM32F37x_StdPeriph_Driver STM32L1xx_StdPeriph_Driver STM32_USB-FS-Device_Driver
и примеров использования:
Audio_Speaker Composite_Examples Custom_HID Device_Firmware_Upgrade JoyStickMouse JoyStickMouse_LPM Mass_Storage VirtualComport_Loopback Virtual_COM_Port
Нас будет интересовать последний пример: "Virtual_COM_Port". Все проекты доступны для IAR, Keil и SW4STM32. Makefiles и Cmake-файлов нет.
В свое время я потратил время, чтобы драйвер очистить от SPL и прочего ненужного мусора, написать Makefile и Cmake-файл, дабы драйвер можно было интегрировать в свой проект.
Драйвер имеет следующую файловую структуру:
$ tree -d . ├── CMSIS │ ├── core │ └── device ├── SPL │ ├── inc │ └── src ├── USB_FS │ ├── inc │ └── src ├── asm ├── inc └── src
В "SPL/src" остался один файл: "misc.c", он используется драйвером. Остальная SPL для работы драйвера не нужна. Сам драйвер раскидан между папками "USB_FS" и "src". В первой расположен "нижний" уровень, в "src" расположены исходники которые определяют то, чем будет ваше устройство: флешкой, мышкой, сканером и т.д. Подробно об этом можно почитать в "UM0424 - User manual STM32 USB-FS-Device development kit". В папке "asm" расположен "startup.s" который содержит таблицу прерываний, код обработчика reset и пр. Файлы "startup.s" и скрипт компоновщика были взяты из файлов драйвера, а не из старых примеров. Я постарался только написать сборочные файлы в стиле предыдущих примеров.
Минимальная прошивка (релизная) с драйвером весит чуть более 7 КБ
$ make size
arm-none-eabi-size build/firmware.elf
text data bss dec hex filename
6428 252 608 7288 1c78 build/firmware.elf
В качестве примера используется эхо-программа, я немного модифицировал исходник "main.c":
#include "main.h" #include "utils.h" #include "hw_config.h" #include "usb_lib.h" #include "usb_pwr.h" #include <stdio.h> uint32_t SystemCoreClock = 72000000; // ===== usb interface ======= uint32_t packet_sent = 1; uint32_t packet_receive = 1; extern __IO uint8_t Receive_Buffer[64]; extern __IO uint32_t Receive_length; extern __IO uint32_t length; uint8_t Send_Buffer[64]; // Add a buffer for accumulating received data #define MAX_RX_BUFFER_SIZE 128 uint8_t rx_buffer[MAX_RX_BUFFER_SIZE]; uint16_t rx_buffer_index = 0; #ifdef DEBUG // Semihosting low-level functions extern void initialise_monitor_handles(void); void enable_semihosting() { // Check if debugger is connected before initializing if (CoreDebug->DHCSR & CoreDebug_DHCSR_C_DEBUGEN_Msk) { initialise_monitor_handles(); printf("Debugger connected, semihosting ready\n"); } } #endif // Function to process received data void process_received_data(const uint8_t* data, uint32_t length) { for (uint32_t i = 0; i < length; i++) { // Store received character rx_buffer[rx_buffer_index++] = data[i]; // Check for buffer overflow if (rx_buffer_index >= MAX_RX_BUFFER_SIZE) { rx_buffer_index = 0; // Reset buffer on overflow CDC_Send_DATA((uint8_t*)"Buffer overflow!\r\n", 18); break; } // Check for EOL sequence (\r\n) if (rx_buffer_index >= 1 && (rx_buffer[rx_buffer_index-1] == '\r' || rx_buffer[rx_buffer_index-1] == '\n')) { // Echo back the complete line if (packet_sent == 1) { CDC_Send_DATA(rx_buffer, rx_buffer_index); } // Reset buffer for next line rx_buffer_index = 0; } } } int main() { #ifdef DEBUG // Initialize semihosting enable_semihosting(); #endif // --- PWR Setup --------------- RCC->APB2ENR |= RCC_APB2Periph_GPIOC; // Enable GPIOC clock RCC->APB2ENR |= RCC_APB2Periph_GPIOA; // Enable GPIOA clock RCC->APB1ENR |= RCC_APB1Periph_USB; // enable USB // --- GPIO configuration ---- // Configure PC13 as push-pull output (max speed 2 MHz) GPIOC->CRH &= ~(GPIO_CRH_CNF13 | GPIO_CRH_MODE13); GPIOC->CRH |= GPIO_CRH_MODE13_1; // Output mode, max speed 2 MHz (0b10) //--------------------------------- // For PA11 (USB DM) GPIOA->CRH &= ~(GPIO_CRH_CNF11 | GPIO_CRH_MODE11); GPIOA->CRH |= (GPIO_CRH_CNF11_1 | GPIO_CRH_MODE11_0 | GPIO_CRH_MODE11_1); // Alt func, max 50MHz // For PA12 (USB DP) GPIOA->CRH &= ~(GPIO_CRH_CNF12 | GPIO_CRH_MODE12); GPIOA->CRH |= (GPIO_CRH_CNF12_1 | GPIO_CRH_MODE12_0 | GPIO_CRH_MODE12_1); // Alt func, max 50MHz // --- USB Setup ------------- USB_Interrupts_Config(); USB_Init(); // ---- SysTick Configuration ---- systick_init(); // Let's go.. __enable_irq(); // Initialize rx buffer rx_buffer_index = 0; for(int i = 0;; i++) { if ((i % 10) == 0) { // every ten ticks // Toggle LED on PC13 GPIOC->ODR ^= GPIO_Pin_13; #ifdef DEBUG if (CoreDebug->DHCSR & CoreDebug_DHCSR_C_DEBUGEN_Msk) { printf("semihosting tick - %u\r\n",(unsigned int)i); } #endif if (bDeviceState == CONFIGURED) { CDC_Send_DATA((uint8_t*)"tick\r\n", 6); } } if (bDeviceState == CONFIGURED) { CDC_Receive_DATA(); // Check to see if we have data if (Receive_length != 0) { process_received_data((uint8_t*)Receive_Buffer, Receive_length); Receive_length = 0; } } else if (bDeviceState == UNCONNECTED) { USB_Init(); // Re-init if disconnected rx_buffer_index = 0; // Reset buffer on disconnect } delay_ms(100); } }
Здесь кроме эхо-программы, еще мигание светодиодом раз в 1 секунду, посылание сообщения "Tick" так раз в секунду, ну и semihosting прикручен. Так же я добавил там обработку конца строки. Пример который прилагался к библиотеке просто распечатывал буфер приемника.
Подключение платы Bluepill следующее. С одной стороны подключается USB-miniUSB кабель, с другой стороны ST-Link V2 тремя(!) проводами: GND, SWDIO, SWCLK. Провод питания НЕ используется, т.к. питание подется с USB.
После прошивки микроконтроллера нужно будет отключить плату от компьютера и подключить заново, ресет здесь не поможет. В dmesg появится лог:
usb 1-6.3: new full-speed USB device number 13 using ehci-pci usb 1-6.3: New USB device found, idVendor=0483, idProduct=5740, bcdDevice= 2.00 usb 1-6.3: New USB device strings: Mfr=1, Product=2, SerialNumber=3 usb 1-6.3: Product: STM32 Virtual COM Port usb 1-6.3: Manufacturer: STMicroelectronics usb 1-6.3: SerialNumber: 8D8738655353 cdc_acm 1-6.3:1.0: ttyACM0: USB ACM device usbcore: registered new interface driver cdc_acm cdc_acm: USB Abstract Control Model driver for USB modems and ISDN adapters
После этого можно будет открыть терминальную программу, и подключиться к микроконтроллеру. Скорость соединения можно будет выставить любую.
С помощью программы Wireshark можно отлаживать работу USB устройства, в частности передача сообщения "tick\r\n" выглядит следующим образом:

Здесь видны входящие данные (URB_BULK in) c длинной данных 6 байт, "tick\r\n". Гораздо интереснее обмен происходит при подключении микроконтроллера к хосту, т.е. к компьютеру. Но мне пока не хотелось бы говорить об этом.
Должен сказать, что в режиме отладки передача сообщений по USB у меня не работала, что несколько досадно. Сообщения через semihosting при этом отправлялись нормально. Релизная прошивка работает нормально. Неудобный момент, что после перепрошивки нужно вытаскивать USB кабель из компьютера и вставлять заново. Очевидно по этой причине, и не работает USB при отладке.
Посмотреть все исходники драйвера или скачать его, можно по ссылке: https://gitlab.com/flank1er/stm32f103c8_cmsis_examples/-/tree/main/15_usb_cdc
17) Регистры I2C интерфейса, делаем сканер I2C шины
I2C модуль STM32F103 очень походит на свой аналог в STM8: здесь имеются standard и fast режимы, возможность работать с 7-битными и 10-битными I2C адресами, наличествуют режимы чтения по одному и по двум байтам, и т.д.
Для начала попробуем сделать сканер I2C шины. Для этого потребуется написать код инициализации I2C модуля STM32, и код инициализации I2C устройства, т.е. получения от него отклика ACK.
Для этого нам понадобится ознакомиться с регистрами I2C модуля. Ниже представлен первый конфигурационный регистр:

Здесь нам будет мешаться биты SMB шины, которая является разновидностью I2C, и в STM32 реализована на базе I2C модуля. Биты: ALERT, PEC, NO STRETCH, ENGC, ENPEC, ENARP, SMB TYPE, SMBUS - нас не будут интересовать т.к. они отвечают за работу SMB шины. Оставшиеся биты знакомы по STM8. PE - включает/выключает I2C модуль. Установка этого бита в ноль, сбрасывает I2C модуль и переводит его в состояние IDLE. SWRST - "отпускает" I2C шину. START - посылает сигнал START на линию, и переводит модуль в режим мастера. Если I2C модуль уже находился в режиме мастера, то повторный START посылает сигнал RESTART. Бит START устанавливается программно, а сбрасывается аппаратно. STOP - посылает одноимённый сигнал на линию, и так же сбрасывается аппаратно.
ACK и POS кон фигурируют режим чтения, в зависимости от комбинации этих битов, а также бита STOP, задается тот или иной режим чтения данных.
Второй конфигурационный регистр:

Здесь нас будет интересовать только последнее поле FREQ, в котором следует указать частоту периферийной шины в мегагерцах, которая тактирует I2C модуль. В нашем случае это APB1 с частотой 36МНz. Т.о. в разделе инициализации I2C пишем:
I2C1->CR2 &= I2C_CR2_FREQ_Reset; //=0xffc0 I2C1->CR2 |= 36; // set FREQ = APB1= 36MHz
или проще будет:
I2C1->CR2 = 36; // set FREQ = APB1= 36MHz
Следующе два регистра задают режим и скорость I2C шины.

Следующий регистр:

Эти два регистра задают 4 варианта конфигурации I2C шины.
Первая конфигурация - Standard Mode с частотой 100 кГц.
В этом режиме, сигнал тактирования шины является правильным меандром, т.е.
Tlow = Thigh
Tlow + Thigh = TI2C = 1/100 кГц = 10 мкс = 10000 нс
На приведенных выше скринах показан пример расчета значений CCR и TRISE для стандартного режима. Исходя из того, что частота APB1 = 36 МГц, считаем:
Thigh = CCR * TPCLK1
TI2C / 2 = CCR * TAPB1
1/100000 / 2 = CCR * 1/(36 * 10^6)
10000нс / 2 = CCR * ~28нс
5000/28 = CCR
CCR ≈ 179
Значение TRISE = APB1 МГц + 1 = 36 +1 = 37.
Таким образом, для стандартного режима СCR = 179, TRISE = 37.
На логическом анализаторе такой сигнал выглядит так:

Вторая конфигурация I2C шины вытекает из первой, т.е. это тот же стандартный режим, но с частотой 400 кГц. Для этого, параметр регистра CCR делим на 4, т.е. 179/4 ≈ 45. Регистр TRISE оставляем без изменения. Итого:
I2C Freq = 400 кГц, // Standard Mode // СCR=45, TRISE=37
Картинка на логическом анализаторе в этом режиме похожа на предыдущую, но только частота равна 400 кГц:

Третья конфигурация I2C шины, это Fast режим при Duty = 0. В этом режиме низкий уровень тактовой частоты CLK в два раза шире высокого. Следовательно период высокого Thigh = 1/3 TI2C, а период низкого сигнала тактовой частоты равен 2/3: ья конфигурация I2C шины, это Fast режим при Duty = 0. В этом режиме низкий уровень тактовой частоты CLK в два раза шире высокого. Следовательно период высокого Tlow = 2/3 TI2C.
Для частоты 400 кГц, TI2C = 1/400000 = 2500 нс. Следовательно, Thigh = 2500/3 = 833 нс.
Тогда, следуя формулам выше:
Thigh = CCR * TPCLK1
TI2C / 3 = CCR * TAPB1
(1/400000) / 3 = CCR * 1/(36 * 10^6)
2500нс / 3 = CCR * ~28нс
833/28 = CCR
CCR ≈ 30
Формулу для расчета TRISE в Fast режиме, по даташиту я не понял, извините. Во всех интернетах пишут так:
I2C1->TRISE = (APB1_CLOCK_FREQ * 300 / 1000) + 1;
Предлагаю это принять на веру, просто потому что это работает. По этой формуле TRISE = 12. APB1_CLOCK_FREQ в формуле выражается в МГц, т.е. (36 * 300 / 1000) +1 = 11.8 ≈ 12.
Итого, третья конфигурация получается такой:
I2C Freq = 400 кГц, // Fast Mode // CCR = (I2C_CCR_FS | 30), TRISE = 12
На логическом анализаторе сигнал I2C шины при такой конфигурации выглядит следующим образом:

Четвертый вариант конфигурирует I2C шину со скважностью тактового сигнала 16/9. Где Tlow = TCLK * 16/25, а Thigh = TCLK * 9/25.
Расчет делителя для регистра CCR будет следующим :
Thigh = 9 * CCR * TPCLK1
TI2C 9/ 25 = 9 * CCR * TAPB1
TI2C / 25 = CCR * TAPB1
(1/400000) / 25 = CCR * 1/(36 * 10^6)
2500нс / 25 = CCR * ~28нс
100нс = CCR * ~28нс
100 / 28 = CCR
CCR ≈ 3.6
И тут возникает проблема с округлением, т.к. округление до 4 будет слишком сильным в процентном соотношении. И здесь нужно обратить обратить внимание на "Note" в описании CCR регистра, которое я обвел красным, и где сказано, что для достижения максимальной частоты I2C шины, частота APB1 должна быть кратной 10 МГц ("It must be a multiple of 10MHz to reach the 400 kHz maximum I2C Fm mode clock").
Т.о. имеем следующую конфигурацию:
I2C1->CCR = I2C_CCR_FS| I2C_CCR_DUTY | 4; // set rise time I2C1->TRISE = 12; // (APB1_CLOCK_FREQ * 300 / 1000) + 1;
Значение регистра TRISE здесь тоже, что и в предыдущем случае.
Если посмотреть на скрин с логического анализатора:

То видно, что частота I2C шины равна 363 кГц. Немного меньше чем 400 кГц, но в рамках стандарта.
В дальнейшем, я буду использовать третью конфигурацию I2C шины, т.е. Fast=1, Duty=0.
Таким образом, функция инициализации I2C1 интерфейса в Fast режиме будет для STM32F103C8 будет выглядеть так:
#define APB1_CLOCK_FREQ 36 // MHz void i2c1_initialization() { RCC->APB2ENR |= RCC_APB2Periph_GPIOB; // enable PORT_B RCC->APB1ENR |= RCC_APB1Periph_I2C1; // enable I2C1 // Setup PB6 - I2C1_CLK, PB7 - I2C1_SDA for I2C1 GPIOB->CRL &= ~(0xF << 24 | 0xF << 28); // Clear PB6 (SCL) and PB7 (SDA) GPIOB->CRL |= (0xE << 24 | 0xE << 28); // Alt. open-drain, 2 MHz disable_i2c1; I2C1->CR2 = APB1_CLOCK_FREQ; // Set FREQ = 36 MHz I2C1->CCR = I2C_CCR_FS | 30; // 400 kHz, Duty=0, Fast=1 I2C1->TRISE = 12; // (APB1_CLOCK_FREQ * 300 / 1000) + 1; }
Макрос "disable_i2c1" будет раскрыт ниже в заголовочном файле "i2c.h".
При работе с I2C модулем будет использоваться регистр данных I2C_DR:

Регистр 16-битный, но рабочие биты только младшие восемь.
Ну и наверное главный рабочий регистр при работе с I2C - это флаговый регистр I2C_SR1:

Здесь нас будут интересовать следующие флаги: SB - флаг сигнала START, ADDR - флаг успешной передачи адреса с получением ACK в ответе, BTF - флаг окончания передачи, TxE - флаг очистки регистра данных, когда байт из регистра данных уходит в сдвиговый регистр, RxNE - флаг поступления данных в регистр данных, AF - флаг получения NACK. Остальные флаги относятся либо к slave режиму либо к SMB, нас они интересовать не будут.
Далее второй флаговый регистр I2C:

Здесь нам будет интересн флаг BUSY, который сигнализирует о занятости шины. Шина может быть занята слейвом когда передача некорректна, если например перепрошили микроконтролер во время чтения данных, или микроконтроллер перезагружается в время передачи данных, и т.д. Перед началом любых действий на шине следует проверять, что шина не занята.
Итак, начинаем писать код. Нам понадобится заголовочный файл из stm32f10x_i2c.h в котором содержатся нужные нам для работы с I2C маски регистров. Т.к. часть масок содержится в файле stm32f10x_i2c.с их придётся скопировать в свой заголовочный файл.
Создадим файл inc/i2c.h следующего содержания (под спойлером):
показать полный код#ifndef __I2C_H__ #define __I2C_H__ #include "stm32f10x.h" #include "stm32f10x_i2c.h" /* I2C SPE mask */ #define I2C_CR1_PE_Set ((uint16_t)0x0001) #define I2C_CR1_PE_Reset ((uint16_t)0xFFFE) /* I2C START mask */ #define I2C_CR1_START_Set ((uint16_t)0x0100) #define I2C_CR1_START_Reset ((uint16_t)0xFEFF) /* I2C STOP mask */ #define I2C_CR1_STOP_Set ((uint16_t)0x0200) #define I2C_CR1_STOP_Reset ((uint16_t)0xFDFF) /* I2C ACK mask */ #define I2C_CR1_ACK_Set ((uint16_t)0x0400) #define I2C_CR1_ACK_Reset ((uint16_t)0xFBFF) /* I2C ENGC mask */ #define I2C_CR1_ENGC_Set ((uint16_t)0x0040) #define I2C_CR1_ENGC_Reset ((uint16_t)0xFFBF) /* I2C SWRST mask */ #define I2C_CR1_SWRST_Set ((uint16_t)0x8000) #define I2C_CR1_SWRST_Reset ((uint16_t)0x7FFF) /* I2C PEC mask */ #define I2C_CR1_PEC_Set ((uint16_t)0x1000) #define I2C_CR1_PEC_Reset ((uint16_t)0xEFFF) /* I2C ENPEC mask */ #define I2C_CR1_ENPEC_Set ((uint16_t)0x0020) #define I2C_CR1_ENPEC_Reset ((uint16_t)0xFFDF) /* I2C ENARP mask */ #define I2C_CR1_ENARP_Set ((uint16_t)0x0010) #define I2C_CR1_ENARP_Reset ((uint16_t)0xFFEF) /* I2C NOSTRETCH mask */ #define I2C_CR1_NOSTRETCH_Set ((uint16_t)0x0080) #define I2C_CR1_NOSTRETCH_Reset ((uint16_t)0xFF7F) /* I2C registers Masks */ #define I2C_CR1_CLEAR_Mask ((uint16_t)0xFBF5) /* I2C DMAEN mask */ #define I2C_CR2_DMAEN_Set ((uint16_t)0x0800) #define I2C_CR2_DMAEN_Reset ((uint16_t)0xF7FF) /* I2C LAST mask */ #define I2C_CR2_LAST_Set ((uint16_t)0x1000) #define I2C_CR2_LAST_Reset ((uint16_t)0xEFFF) /* I2C FREQ mask */ #define I2C_CR2_FREQ_Reset ((uint16_t)0xFFC0) /* I2C ADD0 mask */ #define I2C_OAR1_ADD0_Set ((uint16_t)0x0001) #define I2C_OAR1_ADD0_Reset ((uint16_t)0xFFFE) /* I2C ENDUAL mask */ #define I2C_OAR2_ENDUAL_Set ((uint16_t)0x0001) #define I2C_OAR2_ENDUAL_Reset ((uint16_t)0xFFFE) /* I2C ADD2 mask */ #define I2C_OAR2_ADD2_Reset ((uint16_t)0xFF01) /* I2C F/S mask */ #define I2C_CCR_FS_Set ((uint16_t)0x8000) /* I2C CCR mask */ #define I2C_CCR_CCR_Set ((uint16_t)0x0FFF) /* I2C FLAG mask */ #define I2C_FLAG_Mask ((uint32_t)0x00FFFFFF) /* I2C Interrupt Enable mask */ #define I2C_ITEN_Mask ((uint32_t)0x07000000) #define DS3231_I2C_ADDR (0x68<<1) #define DS3231_CONTROL_REG ((uint8_t)0x0E) #define DS3231_STATUS_REG ((uint8_t)0x0F) #define LAST ((uint8_t)0x01) #define NOLAST ((uint8_t)0x00) #define enable_i2c I2C1->CR1 |= I2C_CR1_PE_Set; // =1, disable I2C #define disable_i2c I2C1->CR1 &= I2C_CR1_PE_Reset; // disable I2C uint8_t init_i2c(uint8_t adr, uint8_t value, uint8_t last); #endif
Здесь uint8_t init_i2c(uint8_t adr, uint8_t value, uint8_t last); - прототип функции инициализации I2C1 модуля. Через функцию вместе с инициализацией передаётся еще один байт. Из практики следует, что если мы "стучимся" на какое-то устройство, значит мы хотим передать ему какую-то команду. Флаги LAST/NOLAST указывают, будет ли этот байт единственным или за ним последуют еще байты.
Основной документ, который нам понадобится для работы с I2C модулем - это аппнот 2824: "STM32F10xxx I2C optimized examples, Application note AN2824"
Алгоритм работы функции инициализации представлен на следующей блок-схеме взятой из аппнота:

1) Вначале мы должны послать сигнал START и дождаться установки флага SB. 2) После сбрасываем флаг SB чтением регистра I2C_SR1. 3) Далее посылаем адрес и ждем установки флага ADDR. 4) Затем сбрасываем флаг ADDR и пишем наш байт данных в регистр I2C_DR и в зависимости от того, будет ли этот байт последним, ждем установки флага TxE или BTF. 5) Если байт был последним, то после установки флага BTF посылаем сигнал STOP, и ждем аппаратного сброса этого флага.
Создаем файл src/i2c.c и пишем в нем реализацию функции init_i2c():
#define I2C_STATUS_ERROR (uint8_t)0x1 #define I2C_STATUS_OK (uint8_t)0x0 void i2c1_stop() { I2C1->CR1 |= I2C_CR1_STOP_Set; // Program the STOP bit while (I2C1->CR1 & I2C_CR1_STOP_Set); // Wait until STOP bit is cleared by hardware } uint8_t init_i2c1(uint8_t adr, uint8_t value, uint8_t last) { // 1. check BUSY if (I2C1->SR2 & I2C_FLAG_BUSY) { // check BUSY line return I2C_STATUS_ERROR; // return if line is BUSY } // 2. send START uint32_t timeout = 100000; I2C1->CR1 |= I2C_CR1_START_Set; //=0x0100, START while (!(I2C1->SR1 & I2C_FLAG_SB) && --timeout); // wait SB if (timeout == 0) return I2C_STATUS_ERROR; (void) I2C1->SR1; // clear SB flag // 3. send ADDR I2C1->DR=adr; // send ADDR timeout = 100000; while (!(I2C1->SR1 & I2C_FLAG_ADDR)) { // wait ADDR if (I2C1->SR1 & I2C_IT_AF) { // if NACK I2C1->SR1 &= ~I2C_IT_AF; // Clear NACK flag return I2C_STATUS_ERROR; } if (--timeout == 0) return I2C_STATUS_ERROR; } (void) I2C1->SR1; // clear ADDR flag (void) I2C1->SR2; // clear ADDR flag // 4. send DATA I2C1->DR=value; if (last == LAST) { while(!(I2C1->SR1 & I2C_FLAG_BTF)); // wait BTF i2c1_stop(); } else { while(!(I2C1->SR1 & I2C_FLAG_TXE)); // wait TXE bit } // 5. return return I2C_STATUS_OK; }
Для скана I2C шины, в главном цикле модуля "main.c" разместим следующий код:
enable_i2c1;
for(int adr=0;adr<128;adr++) {
if (init_i2c1((adr<<1), 0x0, LAST) == 0) {
usart1_printf("Device was found: %x\r\n", adr);
} else
i2c1_stop();
}
disable_i2c1;
I2C устройства подключаются ка пинам PB6(CLK) и PB7(SDA). I2C шина для работы требует подтяжки к питанию, но мне неохота было возиться с резисторами, поэтому я взял модуль дисплея SSD1306, где необходимы резисторы уже были и добавил флешку M24C08 на 1КБ. В мониторе последовательного порта у меня пошел такой лог:
Device was found: 0x3C Device was found: 0x54 Device was found: 0x55 Device was found: 0x56 Device was found: 0x57
Здесь 0x3C - это дисплей, остальное это флешка. Она на 1КБ, но адресация однобайтная, и на каждые 256 байт свой I2C адрес. Флешка имеет ножку "E0", и если она свободна или запитана на землю, то адреса I2C флешки: 0x50, 0x51, 0x52, 0x54. Если ножка "E0" запитана на Vdd (линию питания), то адреса флешки: 0x54, 0x55, 0x56, 0x57.
На логическом анализаторе передача байта данных, получение ACK, и завершение I2C сессии выглядит так:

В режиме отладки, вывод результатов сканирования через semihosting также работает:

18) Функции записи по I2C шине
Запись - это самая простая операция для I2C шины, поэтому начнем с нее.
-
Порядок действий следующий:
- Передаем СТАРТ
- Передаем I2C АДРЕС
- Передаем БАЙТ ДАННЫХ
- Далее, если нужно, передаем СЛЕДУЮЩИЙ БАЙТ, а если нет - то посылаем СТОП
Рассмотренная выше функция uint8_t init_i2c(uint8_t adr, uint8_t value, uint8_t last); включает в себя передачу одного байта. НО часто требуется посылать несколько байт, или целые массивы.
В частности, дисплей SSD1306 требует после передачи I2C адреса послать 0x0, что будет означать, что далее последует код команды, или 0х40, что означает, что далее последует байт данных.
EEPROM M24C08 после передачи I2C адреса требует передачи адреса ячейки памяти, после чего идет один или несколько байт данных.
Для дисплея SSD1306 передача команды реализуется следующей функцией:
#define SSD1306_I2C_ADDRESS 0x3C #define SSD1306_CMD 0x0 #define SSD1306_DATA 0x40 bool ssd1306_send_cmd(uint8_t cmd) { bool ret=true; enable_i2c1; if (init_i2c1((SSD1306_I2C_ADDRESS<<1), SSD1306_CMD, NOLAST) == 0) { uint32_t timeout = I2C_TIMEOUT; I2C1->DR=cmd; while(!(I2C1->SR1 & I2C_FLAG_BTF) && timeout--){ // wait BFT if (I2C1->SR1 & I2C_SR1_AF) { // NACK check I2C1->SR1 &= ~I2C_SR1_AF; // Clear AF flag ret = false; break; } } if (timeout == 9) ret=false; } else ret= false; i2c1_stop(); disable_i2c1; return ret; }
Соответственно, функция инициализации дислея будет следующей:
#define SSD1306_INIT_LEN 25 const uint8_t ssd1306_init_str[SSD1306_INIT_LEN] = {0xAE,0xD5,0x80,0xA8,0x1F,0xD3,0x00,0x00,0x8D,0x14,0x20,0x00, 0xA1,0xC8,0xDA,0x02,0x81,0x8F,0xD9,0xF1,0xDB,0x40,0xA4,0xA6,0xAF}; bool ssd1306_init() { bool ret=true; for(int i=0; i<SSD1306_INIT_LEN; i++) { ret &=ssd1306_send_cmd(ssd1306_init_str[i]); } return ret; }
У дисплея SSD1306 может быть I2C адрес 0x3C или 0x3D. На некоторых модулях имеются перемычки которые позволяют задать нужный адрес. После инициализации на дисплее должны появиться хаотически точки.
На логическом анализаторе передача команд инициализации выглядит следующим образом:

Для заливки дисплея каким либо паттерном требуется передать 512 байт (4х128) данных. Функция заливки будет выглядеть следующим образом:
#define SSD1306_SET_PAGE_ADDR 0x22 #define SSD1306_SET_COL_ADDR 0x21 #define SSD1306_PAGE_START 0x00 #define SSD1306_PAGE_END 0xFF #define SSD1306_COL_START 0x00 #define SSD1306_COL_END 127 bool ssd1306_fill(uint8_t value) { bool ret=true; ssd1306_send_cmd(SSD1306_SET_PAGE_ADDR); // Page Start Address ssd1306_send_cmd(SSD1306_PAGE_START); ssd1306_send_cmd(SSD1306_PAGE_END); ssd1306_send_cmd(SSD1306_SET_COL_ADDR); // Column start address ssd1306_send_cmd(SSD1306_COL_START); ssd1306_send_cmd(SSD1306_COL_END); enable_i2c1; if (init_i2c1((SSD1306_I2C_ADDRESS<<1),SSD1306_DATA,NOLAST) == 0 ) { for(int i=0; i < SSD1306_BUF_SIZE; i++) { I2C1->DR=value; uint32_t timeout = I2C_TIMEOUT; while(!(I2C1->SR1 & I2C_FLAG_BTF) && timeout--){ // wait BFT if (I2C1->SR1 & I2C_SR1_AF) { // NACK check I2C1->SR1 &= ~I2C_SR1_AF; // Clear AF flag ret = false; break; } } if (timeout == 0 || !ret) { ret=false; break; } } } else ret= false; i2c1_stop(); disable_i2c1; return ret; }
Здесь в начале идут команды установки адреса видеопамять на начало координат, а потом уже процесс передачи. Заливка 512 байт на частоте I2C шины 400 кГц занимает 12 мс. Для сравнения у дисплея STE2007 было 864 байта, и процесс заливки занимал 4.5 мс.
Что касается EEPROM M24C08, то там данные можно записывать по одному байту, и тогда перед каждым байтом нужно будет указывать адрес памяти. Либо засписывать постранично блоком до 16 байт включительно. Если послать больше 16 байт, то там будет обнуление счетчика и "лишние" данные буду перезаписывать старые. В даташите имеется наглядная картинка:

Функции записи одного байта и страницы для EEPROM M24C08 являются упрощенной версией функций передачи команды и заливки для дисплея SSD1306, т.к. для EEPROM нет системы команд, требуется лишь передать стартовый адрес ячейки памяти, и дальше можно передавать данные.
// ----------- M24C08 eeprom funcions ----------------------------- #define M24C08_PAGE_SIZE 16 bool m24c08_write_byte(uint8_t i2c_adr, uint8_t adr, uint8_t value) { bool ret=true; enable_i2c1; if (init_i2c1((i2c_adr<<1), adr, NOLAST) == 0) { uint32_t timeout = I2C_TIMEOUT; I2C1->DR=value; while(!(I2C1->SR1 & I2C_FLAG_BTF) && timeout--){ // wait BFT if (I2C1->SR1 & I2C_SR1_AF) { // NACK check I2C1->SR1 &= ~I2C_SR1_AF; // Clear AF flag ret = false; break; } } if (timeout == 9) ret=false; } else ret= false; i2c1_stop(); disable_i2c1; return ret; } bool m24c08_write_page(uint8_t i2c_adr, uint8_t adr, const uint8_t* data, uint8_t len) { bool ret=true; enable_i2c1; if (init_i2c1((i2c_adr<<1),adr,NOLAST) == 0 ) { for(int i=0; i < len; i++) { I2C1->DR=data[i]; uint32_t timeout = I2C_TIMEOUT; while(!(I2C1->SR1 & I2C_FLAG_BTF) && timeout--){ // wait BFT if (I2C1->SR1 & I2C_SR1_AF) { // NACK check I2C1->SR1 &= ~I2C_SR1_AF; // Clear AF flag ret = false; break; } } if (timeout == 0 || !ret) { ret=false; break; } } } else ret= false; i2c1_stop(); disable_i2c1; return ret; }
Для проверки я разместил в главном цикле следующий код:
if (m24c08_write_byte(0x54,0x20, 0xAA)) usart1_print_string("write to eeprom was success\r\n"); else usart1_print_string("write to eeprom was failure\r\n"); for (int i=0; i<M24C08_PAGE_SIZE;i++) eeprom_buf[i] = (i<<2); if (m24c08_write_page(0x55,0x10,eeprom_buf, M24C08_PAGE_SIZE)) usart1_print_string("write to eeprom page was success\r\n"); else usart1_print_string("write to eeprom page was failure\r\n");
Запись страницы из 16-и байт на логическом анализаторе выглядит следующим образом:

После того, как прошивка успешно запишет данные, их можно будет прочитать программатором CH341A.

В программе нужно будет указать тип флешки и щелкнуть по иконке "Читать".
19) Запись на I2C шину посредством DMA
Заливка дисплея SSD1306 занимает 12 мс, это время требуется для передачи на шину 512 байт данных и около десятка команд. Было бы неплохой идеей использовать DMA для передачи, освободив ЦПУ для чего-то более полезного.
Микроконтроллер stm32f103c8 имеет два I2C интерфейса, и для DMA я буду использовать второй интерфейс:

Это ножки PB10 (SCL) и PB11 (SDA).
Для DMA потребуется в первую очередь фрейм-буфер который будет передаваться:
#define SSD1306_BUF_SIZE 512 uint8_t ssd1306_fb[SSD1306_BUF_SIZE] __attribute__((aligned(4)));
Также как в случае использования DMA для USART2, по таблице определяем, что для передачи на I2C шину посредством DMA следует использовать 4-й канал первого DMA контроллера:

Функция инициализации для I2C2 интерфейса микроконтроллера stm32f103c8:
void i2c2_initialization(void) { // 1. Enable clocks for I2C2, GPIOB, and DMA1 RCC->APB2ENR |= RCC_APB2Periph_GPIOB; // enable PORT_B RCC->APB1ENR |= RCC_APB1Periph_I2C2; // enable I2C2 RCC->AHBENR |= RCC_AHBENR_DMA1EN; // enable DMA1 // 2. Configure GPIO pins PB10 (SCL) and PB11 (SDA) // These pins are in the high control register (CRH) // Mode: AF Open-Drain, Speed: 50MHz GPIOB->CRH &= ~(GPIO_CRH_CNF10 | GPIO_CRH_MODE10 | GPIO_CRH_CNF11 | GPIO_CRH_MODE11); // Clear bits GPIOB->CRH |= (GPIO_CRH_CNF10_1 | GPIO_CRH_CNF10_0 | GPIO_CRH_MODE10_1 | GPIO_CRH_MODE10_0);//PB10 =0x0f00 GPIOB->CRH |= (GPIO_CRH_CNF11_1 | GPIO_CRH_CNF11_0 | GPIO_CRH_MODE11_1 | GPIO_CRH_MODE11_0);//PB11 =0xf000 // 3. Configure I2C2 I2C2->CR1 |= I2C_CR1_SWRST; // Reset I2C2 I2C2->CR1 &= ~I2C_CR1_SWRST; // Release reset disable_i2c2; I2C2->CR2 = APB1_CLOCK_FREQ; // Set FREQ = 36 MHz I2C2->CCR = I2C_CCR_FS | 30; // 400 kHz, Duty=0, Fast=1 I2C2->TRISE = 12; // (APB1_CLOCK_FREQ * 300 / 1000) + 1; // 4. Configure and enable interrupts in the NVIC NVIC_SetPriority(DMA1_Channel4_IRQn, 1); NVIC_EnableIRQ(DMA1_Channel4_IRQn); NVIC_SetPriority(I2C2_EV_IRQn, 0); // Give I2C event higher priority NVIC_EnableIRQ(I2C2_EV_IRQn); }
Для работы с DMA потребуется два прерывания, одно для 4-го канла DMA1, которое будет отрабатывать по завершению передачи, и прерывание I2C2_EV которое будет отрабатывать по выставлению флага "BTF".
Функции передачи страта, стопа, команды и инициализации дисплея никак не отличаются от своих вариантов для I2C1, там только единичка заменена для двойку. Поэтому я их не привожу, их можно будет найти в репозитории.
Функция передачи фрейм-буфера на I2C шину посредством DMA:
bool ssd1306_fill_i2c2(uint8_t value) { bool ret=true; ssd1306_send_cmd_i2c2(SSD1306_SET_PAGE_ADDR); // Page Start Address ssd1306_send_cmd_i2c2(SSD1306_PAGE_START); ssd1306_send_cmd_i2c2(SSD1306_PAGE_END); ssd1306_send_cmd_i2c2(SSD1306_SET_COL_ADDR); // Column start address ssd1306_send_cmd_i2c2(SSD1306_COL_START); ssd1306_send_cmd_i2c2(SSD1306_COL_END); for(int i = 0; i < SSD1306_BUF_SIZE; i++) ssd1306_fb[i]=value; enable_i2c2; if (init_i2c2((SSD1306_I2C_ADDRESS<<1),SSD1306_DATA,NOLAST) == 0 ) { // Configure DMA1 Channel 4 for I2C2_TX DMA1_Channel4->CCR &= ~DMA_CCR4_EN; // Disable channel DMA1_Channel4->CPAR = (uint32_t)&I2C2->DR; // Peripheral address DMA1_Channel4->CMAR = (uint32_t)ssd1306_fb; // Memory address DMA1_Channel4->CNDTR = SSD1306_BUF_SIZE; // Number of data to transfer // Configure channel: Memory increment, peripheral destination, interrupt, high priority DMA1_Channel4->CCR = DMA_CCR4_DIR | // Memory → Peripheral DMA_CCR4_MINC | // Memory increment enabled DMA_CCR4_TCIE | // Transfer complete interrupt DMA_CCR4_PL; // Priority: High DMA1->IFCR = DMA_IFCR_CTCIF4; // Enable I2C Event Interrupts, I2C DMA requests, and the DMA channel I2C2->CR2 |= I2C_CR2_ITEVTEN; I2C2->CR2 |= I2C_CR2_DMAEN; DMA1_Channel4->CCR |= DMA_CCR4_EN; } else ret= false; return ret; }
Конфигурация DMA канала почти не отличается от варианта для USART2 рассмотренного выше. Нужно иметь в виду, что по умолчанию размер данных 8 бит, и этот вариант как раз используется, просто не прописан явно.
Обработчики прерываний:
/** * @brief Handles DMA1 Channel 4 interrupt. * @note Fires when the last byte is moved from memory to the I2C Data Register. */ void DMA1_Channel4_IRQHandler(void) { if (DMA1->ISR & DMA_ISR_TCIF4) { // Clear the DMA Transfer Complete flag DMA1->IFCR = DMA_IFCR_CTCIF4; // Disable DMA channel and I2C DMA requests DMA1_Channel4->CCR &= ~DMA_CCR4_EN; I2C2->CR2 &= ~I2C_CR2_DMAEN; // The I2C Event interrupt (on BTF) will handle the STOP condition. } }
По логике вещей, после завершения передачи вызывается обработчик прерывания DMA канала, и он отключает этот DMA канал.
Затем I2C заканчивает передачу, выставляет флаг BTF (Byte Transfer Finished), на него реагирует обработчик прерывания I2C2_EV, который посылает СТОП на линию и отключает I2C2.
/** * @brief Handles I2C2 Event interrupt. * @note Fires on various I2C events, we use it to detect the end of transmission. */ void I2C2_EV_IRQHandler(void) { // Check if the Byte Transfer Finished (BTF) event occurred if (I2C2->SR1 & I2C_SR1_BTF) { // Disable I2C event interrupts until the next transfer I2C2->CR2 &= ~I2C_CR2_ITEVTEN; // This confirms the last byte was sent. Now, generate the STOP condition. I2C2->CR1 |= I2C_CR1_STOP; disable_i2c2; } }
В принципе, второе прерывание не обязательно, его код можно было скинуть в обработчик прерывания DMA, но мне такой вариант показался более интересным.
Я взял на себя смелость, и убрал цикл ожидания установки флага STOPF в SR1 регистре, т.к. циклы в обработчиках прерывания не очень хорошая идея.
Если посмотреть на логический анализатор, то ничего необычного не увидим, время передачи фрейм-буфера составляет 12 мс, при этом около 0.5 мс уходит на перечу команд установки адреса видеопамяти:

Можно видеть, что СТОП на линию передается вполне корректно:

Если посмотреть на тайминги печати сообщений из главного цикла:
12:30:02.706-> tick - 351 12:30:05.714-> tick - 352 12:30:08.706-> tick - 353 12:30:11.713-> tick - 354 12:30:14.705-> tick - 355 12:30:17.713-> tick - 356 12:30:20.721-> tick - 357 12:30:23.713-> tick - 358 12:30:26.721-> tick - 359 12:30:29.712-> tick - 360 12:30:32.720-> tick - 361 12:30:35.712-> tick - 362 12:30:38.720-> tick - 363
то видно, что смещение все-же идет, но как-то странно: "21 - 12 - 20 - 12 - 20". В принципе, передача команд происходит без DMA, да и передача сообщений через UART занимает ощутимое время.
При заливке дисплея без DMA по первому I2C интерфейсу, тайминги получаются следующие:
16:31:50.606-> tick - 85 16:31:53.614-> tick - 86 16:31:56.621-> tick - 87 16:31:59.629-> tick - 88 16:32:02.653-> tick - 89 16:32:05.661-> tick - 90 16:32:08.669-> tick - 91 16:32:11.677-> tick - 92 16:32:14.700-> tick - 93
В обоих случаях, пауза между строками 3 секунды. Все что больше этих трех секунд, это заливка дисплея и вывод сообщения через UART.
20) Однобайтный режим чтения с I2C шины
I2C модуль stm32f103xx имеет режимы чтения: однобайтный, двухбайтный и трехбайтный.
Однобайтное чтение используется когда нужно прочитать какой-либо регистр или ячейку памяти на I2C устройстве.
Порядок работы с I2C модулем в режиме чтения одного байта продемонстрирован на следующей блок-схеме:

Вооружившись этим знанием, добавляем в src/i2c.c функцию чтения:
uint8_t read_byte(uint8_t i2c_adr){ uint8_t ret; I2C1->CR1 |= I2C_CR1_START_Set; // START, =0x0100 while (!(I2C1->SR1 & I2C_FLAG_SB)); // wait SB, while(!(I2C1->SR1 & 0x0001)); (void) I2C1->SR1; // clear SB I2C1->DR=i2c_adr; while (!(I2C1->SR1 & I2C_FLAG_ADDR)); // wait ADDR, while(!(I2C1->SR1 & 0x0002)); I2C1->CR1 &= I2C_CR1_ACK_Reset; // 1.NACK, =0xFBFF __disable_irq(); (void) I2C1->SR1; // 2.reset ADDR (void) I2C1->SR2; // 2.reset ADDR I2C1->CR1 |= I2C_CR1_STOP_Set; // 3.STOP, =0x0200 __enable_irq(); while(!(I2C1->SR1 & I2C_IT_RXNE)); // wait RxNE, while(!(I2C1->SR1 & 0x0040)); ret=I2C1->DR; while (I2C1->CR1 & I2C_CR1_STOP_Set); // wait clear STOP I2C1->CR1 |= I2C_CR1_ACK_Set; // ACK for next byte return ret; }
Для проверки, в главном цикле размещаем вызов функции чтения c EEPROM 24C08 содержимого ячейки "0х20":
enable_i2c1;
if (init_i2c1((0x50<<1), 0x20,LAST) == 0) {
uint8_t data=i2c1_read_byte((0x50<<1)|0x01);
usart1_printf("Read successful: %x\r\n",data);
} else
i2c1_stop();
disable_i2c1;
На логическом анализаторе сессия чтения выглядит так:

В даташите к флешке имеются схемы режимов чтения для данной модели EEPROM, и в данном случае используется следующий режим:

Приведенная выше функция чтения не содержит обработку исключительных ситуаций, т.к. перед ней вызывается "init_i2c1()" которую такую обработку имеет. И если функция "init_i2c1()" отрабатывает нормально, то предполагается, что с I2C шиной все в порядке. Если же хочется использовать отказоустойчивый код, то можно отталкиваться от такого варианта:
typedef enum { I2C_READ_OK, I2C_READ_TIMEOUT, I2C_READ_NACK, I2C_READ_ERROR } i2c_read_status_t; // I2C Timeout (adjust based on clock speed) #define I2C_TIMEOUT 100000 i2c_read_status_t i2c1_read_byte_ex(uint8_t i2c_addr, uint8_t *data) { uint32_t timeout = I2C_TIMEOUT; // 1. Generate START I2C1->CR1 |= I2C_CR1_START; // START, =0x0100 while (!(I2C1->SR1 & I2C_SR1_SB) && timeout--); // wait SB if (timeout == 0) return I2C_READ_TIMEOUT; (void)I2C1->SR1; // clear SB // 2. Send read address I2C1->DR = (i2c_addr << 1) | 0x01; // 3. Wait for address ACK timeout = I2C_TIMEOUT; while (!(I2C1->SR1 & I2C_SR1_ADDR) && timeout--) { // wait ADDR if (I2C1->SR1 & I2C_SR1_AF) { // if got NACK I2C1->SR1 &= ~I2C_SR1_AF; I2C1->CR1 |= I2C_CR1_STOP; return I2C_READ_NACK; } } if (timeout == 0) return I2C_READ_TIMEOUT; // 4. Setup for single byte reception I2C1->CR1 &= ~I2C_CR1_ACK; // 1.NACK, =0xFBFF (void)I2C1->SR1; // 2.clear ADDR (void)I2C1->SR2; // 2.clear ADDR I2C1->CR1 |= I2C_CR1_STOP; // 3.STOP, =0x0200 // 5. Wait for data timeout = I2C_TIMEOUT; while (!(I2C1->SR1 & I2C_SR1_RXNE) && timeout--); // wait RxNE if (timeout == 0) return I2C_READ_TIMEOUT; // 6. Read data *data = I2C1->DR; // 7. Wait for STOP completion timeout = I2C_TIMEOUT; while ((I2C1->CR1 & I2C_CR1_STOP) && timeout--); // wait clear STOP // 8. Restore ACK I2C1->CR1 |= I2C_CR1_ACK; // ACK for next byte return I2C_READ_OK; }
Пример вызова функции:
enable_i2c1;
if (init_i2c1((0x50<<1), 0x20,LAST) == 0) {
uint8_t data;
i2c_read_status_t status = i2c1_read_byte_ex(0x50, &data);
switch (status) {
case I2C_READ_OK:
usart1_printf("Read successful: %x\r\n", data);
break;
case I2C_READ_NACK:
usart1_printf("Device not responding\r\n");
i2c1_stop();
break;
case I2C_READ_TIMEOUT:
usart1_printf("Error timeout\r\n");
i2c1_stop();
break;
default:
usart1_printf("I2C error: %d\r\n", status);
i2c1_stop();
break;
}
} else
i2c1_stop();
disable_i2c1;
21) Чтение массива через шину I2C
Функцию чтения одного байта можно развить до функции чтения массива. Для этого придётся ее утяжелить циклом последовательного чтения байтов с шины I2C.
Для первого варианта функции у меня это получилось так:
void i2c1_read_array(uint8_t adr, uint8_t count,uint8_t* data){ I2C1->CR1 |= I2C_CR1_START_Set; // START, =0x0100 while (!(I2C1->SR1 & I2C_FLAG_SB)); // wait SB, while(!(I2C1->SR1 & 0x0001)); (void) I2C1->SR1; I2C1->DR=adr; while (!(I2C1->SR1 & I2C_FLAG_ADDR)); // wait ADDR, while(!(I2C1->SR1 & 0x0002)); I2C1->CR1 |= I2C_CR1_ACK_Set; // set ACK, 0x0400 (void) I2C1->SR1; // reset ADDR (void) I2C1->SR2; // reset ADDR for(uint8_t i=1;i<=count;i++, data++) { if (i<count) { while(!(I2C1->SR1 & I2C_IT_RXNE)) {}; // wait RxNE, while(!(I2C1->SR1 & 0x0040)); *data=I2C1->DR; } else { I2C1->CR1 &= I2C_CR1_ACK_Reset; // set NACK, =0xFBFF I2C1->CR1 |= I2C_CR1_STOP_Set; // set STOP, =0x0200 while(!(I2C1->SR1 & I2C_IT_RXNE)); // wait RxNE, while(!(I2C1->SR1 & 0x0040)); *data=I2C1->DR; while (I2C1->CR1 & I2C_CR1_STOP_Set); // white STOP, =0x0200 } } I2C1->CR1 |= I2C_CR1_ACK_Set; // set ACK, =0x0400; }
Для примера прочитаем ранее записанную на флешку страницу. Напомню, что это второй банк, это I2C адрес 0x51 или 0х55 (в зависимости от конфигурации пина E0), и адрес памяти 0х10:
enable_i2c1;
if (init_i2c1((0x51<<1), 0x10,LAST) == 0) {
uint8_t page[16];
i2c1_read_array((0x51<<1)|0x01, 16, page);
for (int i=0; i<16; i++)
{
usart1_printf("%x ", page[i]);
}
usart1_print_string("\r\n");
} else
i2c1_stop();
disable_i2c1;
В мониторе последовательного порта получаем строку:
0x0 0x4 0x8 0xC 0x10 0x14 0x18 0x1C 0x20 0x24 0x28 0x2C 0x30 0x34 0x38 0x3C
Что полностью соответствует тому, что было туда записано в страничном режиме.
На логическом анализаторе сессия чтения выглядит так:

Немного мелковато получилось. Начало сессии в крупном масштабе:

И также в крупном масштабе окончание сессии:

В даташите чтение массива с флешки схематично изображено так:

Второй вариант функции чтения массива с I2C шины:
i2c_read_status_t i2c1_read_array_ex(uint8_t i2c_addr, uint8_t *data, uint8_t count) { if (count == 0) return I2C_READ_OK; // Nothing to read if (data == NULL) return I2C_READ_ERROR; // Invalid buffer uint32_t timeout = I2C_TIMEOUT; // 1. Generate START condition I2C1->CR1 |= I2C_CR1_START; while (!(I2C1->SR1 & I2C_SR1_SB) && timeout--); if (timeout == 0) return I2C_READ_TIMEOUT; (void)I2C1->SR1; // Clear SB flag // 2. Send address with READ bit (LSB = 1) I2C1->DR = (i2c_addr << 1) | 0x01; // 3. Wait for address acknowledged timeout = I2C_TIMEOUT; while (!(I2C1->SR1 & I2C_SR1_ADDR) && timeout--) { if (I2C1->SR1 & I2C_SR1_AF) { // NACK received I2C1->SR1 &= ~I2C_SR1_AF; // Clear AF flag I2C1->CR1 |= I2C_CR1_STOP; // Generate STOP return I2C_READ_NACK; } } if (timeout == 0) return I2C_READ_TIMEOUT; // 4. Clear ADDR flag and enable ACK for multiple bytes (void)I2C1->SR1; (void)I2C1->SR2; I2C1->CR1 |= I2C_CR1_ACK; // Enable ACK for multiple bytes // 5. Read data bytes for (uint8_t i = 0; i < count; i++) { if (i == count - 1) { // Last byte: disable ACK and generate STOP I2C1->CR1 &= ~I2C_CR1_ACK; // Disable ACK (NACK) I2C1->CR1 |= I2C_CR1_STOP; // Generate STOP } // Wait for data received timeout = I2C_TIMEOUT; while (!(I2C1->SR1 & I2C_SR1_RXNE) && timeout--); if (timeout == 0) { I2C1->CR1 |= I2C_CR1_STOP; // Ensure STOP is sent return I2C_READ_TIMEOUT; } // Read received data data[i] = I2C1->DR; } // 6. Wait for STOP condition to complete (if not already done) if (count > 0) { timeout = I2C_TIMEOUT; while ((I2C1->CR1 & I2C_CR1_STOP) && timeout--); if (timeout == 0) return I2C_READ_TIMEOUT; } // 7. Re-enable ACK for future operations I2C1->CR1 |= I2C_CR1_ACK; return I2C_READ_OK; }
Она работает аналогично предыдущей, но сложнее для восприятия, хотя написана более правильно, т.к. содержит обработку исключительных ситуаций.
Для вызова данного варианта функции я использовал следующий код :
enable_i2c1;
if (init_i2c1((0x51<<1), 0x10,LAST) == 0) {
uint8_t page[16];
i2c_read_status_t status=i2c1_read_array_ex(0x51, page,sizeof(page));
if (status == I2C_READ_OK) {
usart1_print_string("Read successful: ");
for (uint32_t i = 0; i < sizeof(page); i++) {
usart1_printf("%x ", page[i]);
}
usart1_print_string("\r\n");
} else {
printf("Read failed with error: %d\r\n", status);
}
} else
i2c1_stop();
disable_i2c1;
22) Двухбайтный режим чтения, написание общих функций для I2C
Сейчас написанный I2C драйвер имеет существенный недостаток в виду того, что некоторые функции дублируют друг друга. Для примера, функции генерации СТОП:
void i2c2_stop() { uint32_t timeout = 100000; I2C2->CR1 |= I2C_CR1_STOP_Set; // Program the STOP bit while ((I2C2->CR1 & I2C_CR1_STOP_Set) && --timeout); // Wait until STOP bit is cleared by hardware }
и
void i2c1_stop() { uint32_t timeout = 100000; I2C1->CR1 |= I2C_CR1_STOP_Set; // Program the STOP bit while ((I2C1->CR1 & I2C_CR1_STOP_Set) && --timeout); // Wait until STOP bit is cleared by hardware }
Фактически это одна функция, но для разных I2C интерфейсов. Было бы здорово передавать интерфейс в параметрах функции, как это делается в SPL и HAL. В принципе, это легко сделать, и работает это так. В заголовочном файле "stm32f10x.h" имеется структура с регистрами I2C:
typedef struct { __IO uint16_t CR1; uint16_t RESERVED0; __IO uint16_t CR2; uint16_t RESERVED1; __IO uint16_t OAR1; uint16_t RESERVED2; __IO uint16_t OAR2; uint16_t RESERVED3; __IO uint16_t DR; uint16_t RESERVED4; __IO uint16_t SR1; uint16_t RESERVED5; __IO uint16_t SR2; uint16_t RESERVED6; __IO uint16_t CCR; uint16_t RESERVED7; __IO uint16_t TRISE; uint16_t RESERVED8; } I2C_TypeDef;
И там же имеются ссылки на адреса каждого аппаратного модуля:
#define I2C1 ((I2C_TypeDef *) I2C1_BASE) #define I2C2 ((I2C_TypeDef *) I2C2_BASE)
Соответствено, можно использовать эти ссылки вместо прямой адресации. В частности, функция СТОП приобретет тогда следующий вид:
void stop_i2c(I2C_TypeDef* I2Cx) { uint32_t timeout = 100000; I2Cx->CR1 |= I2C_CR1_STOP_Set; // Program the STOP bit while ((I2Cx->CR1 & I2C_CR1_STOP_Set) && --timeout); // Wait until STOP bit is cleared by hardware }
Где в качестве первого параметра будет макрос "I2C1" или "I2C2". Для примера, напишем функцию чтения двухбайтного числа по I2C.
Двухбайтный режим чтения используется для чтения 16-битных регистров, например в RDA5807.
Порядок работы с I2C модулем в режиме двухбайтного чтения продемонстрирован на следующей блок-схеме:

Как можно видеть, это совсем не то, что чтение двух байт в режиме массива. Реализация этого алгоритма на Си у меня получилась такой:
uint16_t i2c_read_two_bytes(I2C_TypeDef* I2Cx, uint8_t adr){ uint16_t ret=0; uint8_t vl; I2Cx->CR1 |= I2C_CR1_START_Set; // START, =0x0100 while (!(I2Cx->SR1 & I2C_FLAG_SB)); // wait SB, while(!(I2C1->SR1 & 0x0001)); (void) I2Cx->SR1; I2Cx->DR=(adr << 1) | 0x01; while (!(I2Cx->SR1 & I2C_FLAG_ADDR)); // wait ADDR, while(!(I2C1->SR1 & 0x0002)); I2Cx->CR1 |=I2C_PECPosition_Next; // POS=1 __disable_irq(); (void) I2Cx->SR1; // reset ADDR (void) I2Cx->SR2; // reset ADDR I2Cx->CR1 &= I2C_CR1_ACK_Reset; // NACK, =0xFBFF __enable_irq(); while(!(I2Cx->SR1 & I2C_FLAG_BTF)); // wait BFT __disable_irq(); I2Cx->CR1 |= I2C_CR1_STOP_Set; ; // STOP, =0x0200 vl=I2Cx->DR; ret|=(uint16_t)vl; __enable_irq(); while(!(I2Cx->SR1 & I2C_IT_RXNE)); // wait RxNE, while(!(I2C1->SR1 & 0x0040)); vl=I2Cx->DR; ret|=(uint16_t)(vl<<8); while (I2Cx->CR1 & I2C_CR1_STOP_Set); I2Cx->CR1 &= ~(I2C_PECPosition_Next); // POS=0 I2Cx->CR1 |= I2C_CR1_ACK_Set; // ACK=1 return ret; }
Если добавить обработку исключительных ситуаций, то получится следующее:
i2c_read_status_t i2c_read_two_bytes_ex(I2C_TypeDef* I2Cx, uint8_t i2c_addr, uint16_t *data) { uint32_t timeout = I2C_TIMEOUT; // Start condition I2Cx->CR1 |= I2C_CR1_START; while (!(I2Cx->SR1 & I2C_SR1_SB) && timeout--); if (timeout == 0) return I2C_READ_TIMEOUT; (void)I2Cx->SR1; // Send read address I2Cx->DR = (i2c_addr << 1) | 0x01; // Wait for address ACK/NACK timeout = I2C_TIMEOUT; while (!(I2Cx->SR1 & I2C_SR1_ADDR) && timeout--) { if (I2Cx->SR1 & I2C_SR1_AF) { I2Cx->SR1 &= ~I2C_SR1_AF; I2Cx->CR1 |= I2C_CR1_STOP; return I2C_READ_NACK; } } if (timeout == 0) return I2C_READ_TIMEOUT; // Optimized 2-byte read sequence I2Cx->CR1 |= I2C_CR1_POS; __disable_irq(); (void)I2Cx->SR1; (void)I2Cx->SR2; I2Cx->CR1 &= ~I2C_CR1_ACK; __enable_irq(); // Wait for both bytes timeout = I2C_TIMEOUT; while (!(I2Cx->SR1 & I2C_SR1_BTF) && timeout--); if (timeout == 0) { I2Cx->CR1 |= I2C_CR1_STOP; I2Cx->CR1 &= ~I2C_CR1_POS; return I2C_READ_TIMEOUT; } // Read bytes with STOP __disable_irq(); I2Cx->CR1 |= I2C_CR1_STOP; uint8_t first_byte = I2Cx->DR; __enable_irq(); uint8_t second_byte = I2Cx->DR; // Wait for STOP and cleanup timeout = I2C_TIMEOUT; while ((I2Cx->CR1 & I2C_CR1_STOP) && timeout--); I2Cx->CR1 &= ~I2C_CR1_POS; I2Cx->CR1 |= I2C_CR1_ACK; *data = (second_byte << 8) | first_byte; return I2C_READ_OK; }
Пример вызова последней функции для чтения первых двух байт RTC DS3231:
if (start_i2c(I2C1,(DS3231_I2C_ADDR<<1), 0x0,LAST) == 0) { uint16_t data; i2c_read_status_t status = i2c_read_two_bytes_ex(I2C1, DS3231_I2C_ADDR, &data); if (status == I2C_READ_OK) { usart1_printf("Read successful: %x\r\n", data); } else { usart1_printf("Error: %d\r\n", status); } } else stop_i2c(I2C1);
Здесь есть один подводный камень. После или перед функцией чтения двух байт не должны стоять команды включения/выключения интерфейса "DISABLE_I2C(I2C1)", иначе вместо второго байта придет значение "0хFF".
На логическом анализаторе чтение двух байт выглядит так:

Здесь первый прочитанный байт - это секунды, а второй - минуты.
Если же после функции чтения все же поставить команду отключения интерфейса, то получим два NACK:

И даже когда не стоят команды включения/выключения интерфейса I2C интерфейса, после включения микроконтроллера (или перепрошивки) идет такой лог:
ready... tick - 0 Read successful: 0xFF20 tick - 1 Read successful: 0x1723 tick - 2 Read successful: 0x1726 tick - 3 Read successful: 0x1729
Т.е. в первый раз чтение отрабатывает некорректно, а потом работает нормально. Такой вот интересный баг.
Напоминаю, что посмотреть или скачать исходники можно по ссылке https://gitlab.com/flank1er/stm32f103c8_cmsis_examples.